Was ist die Essenz des Gesetzes der Addition von Bewegungsgeschwindigkeiten? Das Gesetz der Addition von Geschwindigkeiten zu Hundert
Lesen Sie auch
Hauptartikel: Geschwindigkeitsadditionssatz
In der klassischen Mechanik ist die absolute Geschwindigkeit eines Punktes gleich der Vektorsumme seiner relativen und tragbaren Geschwindigkeiten:
Diese Gleichheit stellt den Inhalt der Aussage des Satzes über die Addition von Geschwindigkeiten dar.
In einfachen Worten: Die Bewegungsgeschwindigkeit eines Körpers relativ zu einem festen Bezugssystem ist gleich der Vektorsumme der Geschwindigkeit dieses Körpers relativ zu einem sich bewegenden Bezugssystem und der Geschwindigkeit (relativ zu einem festen Bezugssystem) dieses Punktes des bewegten Bezugssystems Bezugspunkt bei dem dieser Moment Zeit, in der der Körper lokalisiert wird.
1. Die absolute Geschwindigkeit einer Fliege, die entlang des Radius einer rotierenden Schallplatte kriecht, ist gleich der Summe ihrer Bewegungsgeschwindigkeit relativ zur Schallplatte und der Geschwindigkeit, die der Punkt der Schallplatte unter der Fliege relativ zum Boden hat ( d.h. mit welcher der Datensatz ihn aufgrund seiner Rotation trägt).
2. Wenn eine Person den Korridor eines Wagens mit einer Geschwindigkeit von 5 Kilometern pro Stunde relativ zum Wagen entlang geht und sich der Wagen mit einer Geschwindigkeit von 50 Kilometern pro Stunde relativ zur Erde bewegt, dann bewegt sich die Person relativ zur Erde bei einer Geschwindigkeit von 50 + 5 = 55 Stundenkilometern beim Gehen in Fahrtrichtung des Zuges und bei einer Geschwindigkeit von 50 - 5 = 45 Stundenkilometern bei Fahrt in die Gegenrichtung. Bewegt sich eine Person im Waggonkorridor relativ zur Erde mit einer Geschwindigkeit von 55 Kilometern pro Stunde und ein Zug mit einer Geschwindigkeit von 50 Kilometern pro Stunde, dann beträgt die Geschwindigkeit der Person relativ zum Zug 55 - 50 = 5 Kilometer pro Stunde.
3. Wenn sich die Wellen relativ zum Ufer mit einer Geschwindigkeit von 30 Kilometern pro Stunde bewegen und sich das Schiff ebenfalls mit einer Geschwindigkeit von 30 Kilometern pro Stunde bewegt, dann bewegen sich die Wellen relativ zum Schiff mit einer Geschwindigkeit von 30 - 30 = 0 Kilometer pro Stunde, das heißt, sie werden relativ zum Schiff bewegungslos.
Aus der Beschleunigungsformel folgt, dass, wenn sich ein bewegtes Bezugssystem relativ zum ersten ohne Beschleunigung bewegt, das heißt, die Beschleunigung des Körpers relativ zu beiden Bezugssystemen gleich ist.
Da in der Newtonschen Dynamik von den kinematischen Größen die Beschleunigung eine Rolle spielt (siehe das zweite Newtonsche Gesetz), ist es dann ganz natürlich anzunehmen, dass die Kräfte nur von der relativen Position und Geschwindigkeit physikalischer Körper (und nicht von deren) abhängen Position relativ zum abstrakten Ursprung), stellt sich heraus, dass alle Gleichungen der Mechanik in jedem Inertial-Referenzsystem identisch geschrieben werden – mit anderen Worten, die Gesetze der Mechanik hängen nicht davon ab, in welchem der Inertial-Referenzsysteme wir sie untersuchen. hängen nicht von der Wahl eines bestimmten Trägheitsbezugssystems als Arbeitssystem ab.
Daher hängt auch die beobachtete Bewegung von Körpern nicht von einer solchen Wahl des Bezugssystems ab (natürlich unter Berücksichtigung der Anfangsgeschwindigkeiten). Diese Aussage ist bekannt als Galileis Relativitätsprinzip, im Gegensatz zu Einsteins Relativitätsprinzip
Dieses Prinzip wird anders (in Anlehnung an Galilei) wie folgt formuliert:
Wenn in zwei geschlossenen Laboratorien, von denen sich eines relativ zum anderen gleichmäßig geradlinig (und translatorisch) bewegt, das gleiche mechanische Experiment durchgeführt wird, ist das Ergebnis dasselbe.
Die Forderung (Postulat) des Relativitätsprinzips folgt zusammen mit den intuitiv offensichtlich erscheinenden galiläischen Transformationen weitgehend der Form und Struktur der Newtonschen Mechanik (und hatte historisch gesehen auch einen wesentlichen Einfluss auf deren Formulierung). Etwas formaler ausgedrückt erlegen sie der Struktur der Mechanik Beschränkungen auf, die ihre möglichen Formulierungen, die historisch gesehen einen großen Beitrag zu ihrer Gestaltung geleistet haben, ganz erheblich beeinflussen.
Schwerpunkt eines Systems materieller Punkte
Die Lage des Massenschwerpunkts (Trägheitszentrum) eines Systems materieller Punkte in der klassischen Mechanik wird bestimmt auf die folgende Weise:
Wo ist der Radiusvektor des Massenschwerpunkts, ist der Radiusvektor ich Der Punkt des Systems ist die Masse ich Punkt.
Für den Fall kontinuierlicher Massenverteilung:
Dabei ist die Gesamtmasse des Systems, das Volumen und die Dichte. Der Massenschwerpunkt charakterisiert somit die Massenverteilung über einen Körper oder ein Teilchensystem.
Es kann gezeigt werden, dass, wenn ein System nicht aus materiellen Punkten, sondern aus ausgedehnten Körpern mit Massen besteht, der Radiusvektor des Massenschwerpunkts eines solchen Systems mit den Radiusvektoren der Massenschwerpunkte der Körper durch die Beziehung zusammenhängt Beziehung:
Mit anderen Worten: Bei ausgedehnten Körpern gilt die Formel, deren Struktur mit der für materielle Punkte übereinstimmt.
Bewegungsgesetz des Massenschwerpunkts
Satz über die Bewegung des Massenschwerpunkts (Trägheitszentrum) des Systems- einer der allgemeinen Sätze der Dynamik, ist eine Folge der Newtonschen Gesetze. Gibt an, dass die Beschleunigung des Massenschwerpunkts Mechanisches System hängt nicht von den inneren Kräften ab, die auf die Körper des Systems einwirken, und verbindet diese Beschleunigung mit äußeren Kräften, die auf das System einwirken.
Die im Satz diskutierten Objekte können insbesondere die folgenden sein:
Impuls eines materiellen Punktes und Körpersystems ist eine physikalische Vektorgröße, die ein Maß für die Wirkung einer Kraft ist und von der Wirkungszeit der Kraft abhängt.
Impulserhaltungssatz (Beweis)
Gesetz der Impulserhaltung(Das Impulserhaltungsgesetz) besagt, dass die Vektorsumme der Impulse aller Körper des Systems ein konstanter Wert ist, wenn die Vektorsumme der auf das System einwirkenden äußeren Kräfte gleich Null ist.
In der klassischen Mechanik wird der Impulserhaltungssatz üblicherweise als Folge der Newtonschen Gesetze abgeleitet. Aus den Newtonschen Gesetzen kann gezeigt werden, dass bei Bewegungen im leeren Raum der Impuls zeitlich erhalten bleibt und bei Vorhandensein einer Wechselwirkung die Geschwindigkeit seiner Änderung durch die Summe der ausgeübten Kräfte bestimmt wird.
Wie alle grundlegenden Erhaltungssätze ist auch der Impulserhaltungssatz gemäß dem Noether-Theorem mit einer der grundlegenden Symmetrien verbunden: Homogenität des Raumes.
Nach dem zweiten Newtonschen Gesetz für ein System von N Partikel:
Wo ist der Impuls des Systems?
a ist die Resultierende aller Kräfte, die auf die Teilchen des Systems wirken
Hier ist die Resultierende der einwirkenden Kräfte N Das Teilchen von der Seite M-oh, a ist die Resultierende aller wirkenden äußeren Kräfte k Teilchen. Nach dem dritten Newtonschen Gesetz sind die Kräfte der Form und gleich Absolutwert und entgegengesetzt in der Richtung, das heißt. Daher ist die zweite Summe auf der rechten Seite von Ausdruck (1) gleich Null, und wir finden, dass die Ableitung des Impulses des Systems nach der Zeit gleich der Vektorsumme aller auf das System wirkenden äußeren Kräfte ist:
Innere Kräfte werden durch das dritte Newtonsche Gesetz ausgeschlossen.
Für Systeme von N Teilchen, bei denen die Summe aller äußeren Kräfte Null ist
oder für Systeme, deren Teilchen nicht durch äußere Kräfte beeinflusst werden (für alle k von 1 bis n), gilt
Wenn die Ableitung eines Ausdrucks bekanntlich gleich Null ist, dann ist dieser Ausdruck gleich Null Konstante in Bezug auf die Differenzierungsvariable, was bedeutet:
(konstanter Vektor).
Das heißt, der Gesamtimpuls des Systems aus N Teilchen, wo N Jede Ganzzahl ist ein konstanter Wert. Für N=1 wir erhalten einen Ausdruck für ein Teilchen.
Der Impulserhaltungssatz gilt nicht nur für Systeme, auf die keine äußeren Kräfte einwirken, sondern auch für Systeme, bei denen die Summe aller äußeren Kräfte gleich Null ist. Die Gleichheit aller äußeren Kräfte zu Null ist ausreichend, aber nicht notwendig, um den Impulserhaltungssatz zu erfüllen.
Wenn die Projektion der Summe der äußeren Kräfte auf eine beliebige Richtung oder Koordinatenachse gleich Null ist, dann sprechen wir in diesem Fall vom Gesetz der Erhaltung der Impulsprojektion auf diese Richtung oder Koordinatenachse.
Dynamik Rotationsbewegung solide
Das Grundgesetz der Dynamik eines MATERIALPUNKTES bei Rotationsbewegung lässt sich wie folgt formulieren:
„Das Produkt aus Trägheitsmoment und Winkelbeschleunigung ist gleich dem resultierenden Moment der auf einen materiellen Punkt wirkenden Kräfte: „M = I·e.
Das Grundgesetz der Dynamik der Rotationsbewegung eines STARREN KÖRPERS relativ zu einem festen Punkt lässt sich wie folgt formulieren:
„Das Produkt aus dem Trägheitsmoment eines Körpers und seiner Winkelbeschleunigung ist gleich dem Gesamtmoment der auf den Körper wirkenden äußeren Kräfte. Die Kraft- und Trägheitsmomente werden relativ zur Achse (z) gemessen, um die die Drehung erfolgt:“
Grundbegriffe: Kraftmoment, Trägheitsmoment, Impulsmoment
Moment der Macht (Synonyme: Drehmoment, Drehmoment, Drehmoment, Drehmoment) ist eine vektorielle physikalische Größe, die dem Vektorprodukt des Radiusvektors (der per Definition von der Drehachse zum Kraftangriffspunkt gezogen wird) und dem Vektor dieser Kraft entspricht. Charakterisiert die Rotationswirkung einer Kraft auf einen festen Körper.
Die Begriffe „Drehmoment“ und „Drehmoment“ sind im Allgemeinen nicht identisch, da in der Technik der Begriff „Drehmoment“ als eine äußere Kraft betrachtet wird, die auf ein Objekt ausgeübt wird, und „Drehmoment“ eine innere Kraft ist, die in einem Objekt entsteht unter dem Einfluss aufgebrachter Lasten (dieser Begriff wird im Bereich der Materialbeständigkeit verwendet).
Trägheitsmoment- eine skalare (im allgemeinen Fall ein Tensor) physikalische Größe, ein Maß für die Trägheit bei der Rotationsbewegung um eine Achse, ebenso wie die Masse eines Körpers ein Maß für seine Trägheit bei der Translationsbewegung ist. Es wird durch die Massenverteilung im Körper charakterisiert: Das Trägheitsmoment ist gleich der Summe der Produkte der Elementarmassen mit dem Quadrat ihrer Abstände zur Basismenge (Punkt, Linie oder Ebene).
Maßeinheit in Internationales System Einheiten (SI): kg m².
Schwung(kinetischer Impuls, Drehimpuls, Bahnimpuls, Drehimpuls) charakterisiert das Ausmaß der Rotationsbewegung. Eine Größe, die davon abhängt, wie viel Masse rotiert, wie sie relativ zur Rotationsachse verteilt ist und mit welcher Geschwindigkeit die Rotation erfolgt.
Es ist zu beachten, dass Rotation hier im weitesten Sinne verstanden wird und nicht nur als regelmäßige Rotation um eine Achse. Selbst wenn sich beispielsweise ein Körper geradlinig an einem beliebigen imaginären Punkt vorbeibewegt, der nicht auf der Bewegungslinie liegt, hat er auch einen Drehimpuls. Die vielleicht größte Rolle spielt der Drehimpuls bei der Beschreibung der tatsächlichen Drehbewegung. Es ist jedoch für eine viel größere Klasse von Problemen äußerst wichtig (insbesondere, wenn das Problem eine zentrale oder axiale Symmetrie aufweist, aber nicht nur in diesen Fällen).
Kommentar: Der Drehimpuls um einen Punkt ist ein Pseudovektor und der Drehimpuls um eine Achse ist ein Pseudoskalar.
Der Drehimpuls eines geschlossenen Systems bleibt erhalten.
Unter mechanischer Bewegung versteht man die zeitliche Änderung der Position eines Körpers im Raum relativ zu anderen Körpern.
Der Schlüsselbegriff in dieser Definition ist „relativ zu anderen Körpern“. Jeder von uns ist relativ zu jeder Oberfläche bewegungslos, aber relativ zur Sonne führen wir zusammen mit der gesamten Erde eine Umlaufbewegung mit einer Geschwindigkeit von 30 km/s aus, das heißt, die Bewegung hängt vom Bezugssystem ab.
Ein Referenzsystem ist eine Reihe von Koordinatensystemen und Uhren, die mit dem Körper verknüpft sind, relativ zu dem die Bewegung untersucht wird.
Wenn wir beispielsweise die Bewegungen von Passagieren in einem Auto beschreiben, kann das Referenzsystem einem Straßencafé, dem Innenraum eines Autos oder einem entgegenkommenden Auto zugeordnet werden, wenn wir die Überholzeit schätzen
Koordinaten und Zeit umrechnen
Gesetz der Addition von Geschwindigkeiten ist eine Folge von Koordinaten- und Zeittransformationen.
Lassen Sie das Teilchen im Moment der Zeit T' ist am Punkt (x’, y’, z’), und nach kurzer Zeit Δt' am Punkt (x’ + Δx’, y’ + Δy’, z’ + Δz’) Referenzsysteme K' . Dies sind zwei Ereignisse in der Geschichte eines sich bewegenden Teilchens. Wir haben:
Δx' =v x 'Δt’,
Wo
v x ' — X-te Komponente der Teilchengeschwindigkeit im System K'.
Ähnliche Beziehungen gelten für die übrigen Komponenten.
Koordinatenunterschiede und Zeitintervalle (Δx, Δy, Δz, Δt) werden wie Koordinaten umgerechnet:
Δx =Δx' +VΔt’,
Δy =Δу',
Δz =Δz’,
Δt =Δt'.
Daraus folgt die Geschwindigkeit desselben Teilchens im System K wird die Komponenten haben:
v x =Δx/Δt = (Δx' +VΔt’) /Δt =v x ’ +V,
v y =v y ',
v z =v z’.
Das Gesetz der Addition von Geschwindigkeiten. Es kann in Vektorform ausgedrückt werden:
v =v̅’ +V
(Koordinatenachsen in den Systemen K und K‘ sind parallel).
Gesetz der Addition von Geschwindigkeiten
Wenn sich ein Körper relativ zum Bezugssystem K 1 mit der Geschwindigkeit V 1 bewegt und sich das Bezugssystem K 1 selbst relativ zu einem anderen Bezugssystem K 2 mit der Geschwindigkeit V bewegt, dann ist die Geschwindigkeit des Körpers (V 2) relativ zum zweiten Bezugssystem Rahmen K 2 ist gleich der geometrischen Summe der Vektoren V 1 und V.
Die Geschwindigkeit eines Körpers relativ zu einem festen Bezugssystem ist gleich der Vektorsumme der Geschwindigkeit des Körpers relativ zu einem bewegten Bezugssystem und der Geschwindigkeit eines bewegten Bezugssystems relativ zu einem stationären Bezugssystem.
\(\vec(V_2) = \vec(V_1) + \vec(V) \)
wo immer
K 2 - fester Bezugsrahmen
V 2 - Körpergeschwindigkeit relativ zu einem festen Bezugssystem (K 2)
K 1 - beweglicher Bezugsrahmen
V 1 - Körpergeschwindigkeit relativ zum bewegten Bezugssystem (K 1)
V - Geschwindigkeit des bewegten Bezugssystems (K 1) relativ zum stationären Bezugssystem (K 2)
Gesetz der Addition von Beschleunigungen für translatorische Bewegungen
Bei translatorischer Bewegung eines Körpers relativ zu einem bewegten Bezugssystem und eines bewegten Bezugssystems relativ zu einem stationären ist der Beschleunigungsvektor eines materiellen Punktes (Körpers) relativ zu einem stationären Bezugssystem $\overrightarrow(a)=\ frac(d\overrightarrow(v))(dt)=\ (\ overrightarrow(a))_(ABS)$ (absolute Beschleunigung) ist die Summe des Beschleunigungsvektors des Körpers relativ zum sich bewegenden Referenzrahmen $(\overrightarrow (a))_r=\frac(d(\overrightarrow(v))_r)(dt)= (\overrightarrow(a))_(RTN)$ (relative Beschleunigung) und der Beschleunigungsvektor des sich bewegenden Bezugssystems relativ zum stationären $(\overrightarrow(a))_е=\frac(d(\overrightarrow(v))_е)(dt) =(\overrightarrow(a))_(PER)$ (tragbare Beschleunigung):
\[(\overrightarrow(a))_(ABS)=(\overrightarrow(a))_(OTN)+(\overrightarrow(a))_(PER)\]
Wenn die Bewegung eines materiellen Punktes (Körpers) im Allgemeinen krummlinig ist, kann sie zu jedem Zeitpunkt als Kombination der translatorischen Bewegung eines materiellen Punktes (Körpers) relativ zu einem sich bewegenden Referenzrahmen mit einer Geschwindigkeit dargestellt werden \((\overrightarrow(v))_r \) und Rotationsbewegung eines bewegten Bezugssystems relativ zu einem stationären mit Winkelgeschwindigkeit \((\overrightarrow(\omega ))_e \). In diesem Fall muss bei der Addition der Beschleunigungen neben der Relativ- und Transferbeschleunigung auch die Coriolis-Beschleunigung berücksichtigt werden \(a_c=2(\overrightarrow(\omega ))_e\times (\overrightarrow(v))_r \), das die durch die Translationsbewegung verursachte Änderung der Relativgeschwindigkeit und die durch die Relativbewegung verursachte Änderung der Translationsgeschwindigkeit charakterisiert.
Coriolis-Theorem
Beschleunigungsvektor eines materiellen Punktes (Körpers) relativ zu einem festen Bezugssystem \(\overrightarrow(a)=\frac(d\overrightarrow(v))(dt)=\ (\overrightarrow(a))_(ABS) \)(absolute Beschleunigung) ist die Summe des Beschleunigungsvektors des Körpers relativ zum sich bewegenden Bezugssystem \((\overrightarrow(a))_r=\frac(d(\overrightarrow(v))_r)(dt)=(\overrightarrow(a))_(OTN) \)(relative Beschleunigung), der Beschleunigungsvektor eines sich bewegenden Bezugssystems relativ zu einem stationären \((\overrightarrow(a))_е=\frac(d(\overrightarrow(v))_е)(dt)=(\overrightarrow(a))_(PER) \)(Transportbeschleunigung) und Coriolis-Beschleunigung \(a_c=2(\overrightarrow((\mathbf \omega )))_e\times (\overrightarrow(v))_r=(\overrightarrow(a))_(KOR) \):
\[(\overrightarrow(a))_(ABS)=(\overrightarrow(a))_(OTN)+(\overrightarrow(a))_(PER)+(\overrightarrow(a))_(KOR)\ ]
Die absolute Bewegung ist gleich der Summe der relativen und tragbaren Bewegungen.
Die Verschiebung eines Körpers in einem festen Bezugssystem ist gleich der Summe der Verschiebungen: des Körpers in einem bewegten Bezugssystem und des sich bewegenden Bezugssystems selbst relativ zum stationären.
Javascript ist in Ihrem Browser deaktiviert.Um Berechnungen durchführen zu können, müssen Sie ActiveX-Steuerelemente aktivieren!
Was Newton Ende des 17. Jahrhunderts formulierte, galt etwa zweihundert Jahre lang als alles erklärend und unfehlbar. Bis ins 19. Jahrhundert schienen seine Prinzipien allmächtig und bildeten die Grundlage der Physik. Zu diesem Zeitpunkt tauchten jedoch neue Tatsachen auf, die sich nicht in den üblichen Rahmen bekannter Gesetze einordnen ließen. Im Laufe der Zeit erhielten sie eine andere Erklärung. Dies geschah mit dem Aufkommen der Relativitätstheorie und der mysteriösen Wissenschaft der Quantenmechanik. In diesen Disziplinen wurden alle bisher akzeptierten Vorstellungen über die Eigenschaften von Zeit und Raum einer radikalen Revision unterzogen. Insbesondere das relativistische Gesetz der Addition von Geschwindigkeiten hat die Grenzen klassischer Dogmen beredt bewiesen.
Einfache Addition von Geschwindigkeiten: Wann ist das möglich?
Newtons Klassiker der Physik gelten immer noch als korrekt und seine Gesetze werden zur Lösung vieler Probleme verwendet. Man muss nur bedenken, dass sie in der uns bekannten Welt agieren, in der die Geschwindigkeiten verschiedener Objekte in der Regel keine Rolle spielen.
Stellen wir uns eine Situation vor, in der ein Zug aus Moskau fährt. Seine Geschwindigkeit beträgt 70 km/h. Und zu diesem Zeitpunkt fährt ein Passagier in Fahrtrichtung von einem Waggon zum anderen und läuft dabei 2 Meter in einer Sekunde. Um die Geschwindigkeit seiner Bewegung relativ zu den vor dem Zugfenster blinkenden Häusern und Bäumen herauszufinden, müssen die angegebenen Geschwindigkeiten einfach addiert werden. Da 2 m/s 7,2 km/h entsprechen, beträgt die gewünschte Geschwindigkeit 77,2 km/h.

Welt der hohen Geschwindigkeiten
Photonen und Neutrinos sind eine andere Sache, sie gehorchen völlig anderen Regeln. Für sie gilt das relativistische Gesetz der Geschwindigkeitsaddition, und das oben dargestellte Prinzip gilt für sie als völlig unanwendbar. Warum?
Nach der speziellen Relativitätstheorie (STR) kann sich kein Objekt schneller als Licht bewegen. Sie ist drin als letztes nur annähernd mit diesem Parameter vergleichbar sein. Wenn wir uns jedoch für eine Sekunde vorstellen (obwohl dies in der Praxis unmöglich ist), dass sich im vorherigen Beispiel der Zug und der Passagier ungefähr auf diese Weise bewegen, dann ist ihre Geschwindigkeit relativ zu den auf dem Boden ruhenden Objekten, an denen der Zug vorbeifährt , würde fast der doppelten Lichtgeschwindigkeit entsprechen. Und das sollte nicht passieren. Wie werden in diesem Fall Berechnungen durchgeführt?
Das aus dem Physikkurs der 11. Klasse bekannte relativistische Additionsgesetz der Geschwindigkeiten wird durch die unten angegebene Formel dargestellt.

Was bedeutet das?
Wenn es zwei Referenzsysteme gibt, deren Geschwindigkeit relativ zu denen V 1 und V 2 beträgt, können Sie für Berechnungen die angegebene Beziehung verwenden, unabhängig vom Wert bestimmter Größen. Für den Fall, dass beide deutlich kleiner als die Lichtgeschwindigkeit sind, ist der Nenner auf der rechten Seite der Gleichheit praktisch gleich 1. Dies bedeutet, dass die Formel für das relativistische Gesetz der Geschwindigkeitsaddition zur gebräuchlichsten wird , also V 2 = V 1 + V.
Es sollte auch beachtet werden, dass bei V 1 = C (d. h. der Lichtgeschwindigkeit) für jeden Wert von V V 2 diesen Wert nicht überschreitet, d. h. es wird auch gleich C sein.
Aus dem Reich der Fantasie
C ist eine Grundkonstante, ihr Wert beträgt 299.792.458 m/s. Seit Einstein glaubt man, dass kein Objekt im Universum die Bewegung des Lichts im Vakuum übertreffen kann. So können wir das relativistische Gesetz der Geschwindigkeitsaddition kurz definieren.
Damit wollten sich Science-Fiction-Autoren jedoch nicht abfinden. Sie haben viele erstaunliche Geschichten erfunden und erfinden sie weiterhin, deren Helden eine solche Einschränkung widerlegen. In einem Augenblick Raumschiffe Sie bewegen sich zu fernen Galaxien, die viele tausend Lichtjahre von der alten Erde entfernt liegen, und machen damit alle etablierten Gesetze des Universums zunichte.

Aber warum sind sich Einstein und seine Anhänger sicher, dass dies in der Praxis nicht passieren kann? Wir sollten darüber sprechen, warum die Lichtgrenze so unerschütterlich und das relativistische Gesetz der Addition von Geschwindigkeiten unantastbar ist.
Zusammenhang von Ursache und Wirkung
Licht ist ein Informationsträger. Es ist ein Spiegelbild der Realität des Universums. Und die Lichtsignale, die den Betrachter erreichen, erzeugen in seinem Kopf Bilder der Realität. Dies geschieht in der uns vertrauten Welt, in der alles seinen gewohnten Gang geht und den gewohnten Regeln gehorcht. Und von Geburt an sind wir daran gewöhnt, dass es nicht anders sein kann. Was aber, wenn wir uns vorstellen, dass sich alles um uns herum verändert hat und jemand mit Überlichtgeschwindigkeit in den Weltraum geflogen ist? Da er den Photonen des Lichts voraus ist, erscheint ihm die Welt wie ein rückwärts abgespielter Film. Statt morgen kommt für ihn gestern, dann vorgestern und so weiter. Und er wird natürlich nie das Morgen sehen, bis er aufhört.

Übrigens haben auch Science-Fiction-Autoren eine ähnliche Idee aktiv übernommen und mithilfe dieser Prinzipien ein Analogon einer Zeitmaschine geschaffen. Ihre Helden reisten in die Vergangenheit und reisten dorthin. Allerdings brachen die Ursache-Wirkungs-Beziehungen zusammen. Und es stellte sich heraus, dass dies in der Praxis kaum möglich ist.
Andere Paradoxien
Der Grund dafür, dass es nicht weiter vorne liegen kann, widerspricht der normalen menschlichen Logik, denn im Universum muss Ordnung herrschen. SRT impliziert jedoch auch andere Paradoxien. Sie sagt, selbst wenn das Verhalten von Objekten der strengen Definition des relativistischen Gesetzes der Addition von Geschwindigkeiten gehorche, sei es auch unmöglich, die Geschwindigkeit der Bewegung mit Photonen des Lichts genau anzupassen. Warum? Ja, weil wahrhaft magische Transformationen stattfinden. Die Masse nimmt endlos zu. Die Abmessungen eines materiellen Objekts in Bewegungsrichtung gehen auf unbestimmte Zeit gegen Null. Und auch hier lassen sich Störungen im Laufe der Zeit nicht vollständig vermeiden. Obwohl es sich nicht rückwärts bewegt, stoppt es vollständig, wenn es die Lichtgeschwindigkeit erreicht.
Sonnenfinsternis von Io
SRT gibt an, dass Lichtphotonen am häufigsten vorkommen schnelle Objekte im Universum. Wie war es in diesem Fall möglich, ihre Geschwindigkeit zu messen? Es stellte sich nur heraus, dass das menschliche Denken schneller war. Sie konnte ein ähnliches Dilemma lösen und seine Konsequenz war das relativistische Gesetz der Addition von Geschwindigkeiten.
Ähnliche Fragen wurden bereits zu Newtons Zeiten gelöst, insbesondere im Jahr 1676 vom dänischen Astronomen O. Roemer. Er erkannte, dass die Geschwindigkeit ultraschnellen Lichts nur bestimmt werden kann, wenn es enorme Entfernungen zurücklegt. Dies sei, so dachte er, nur im Himmel möglich. Und die Gelegenheit, diese Idee zum Leben zu erwecken, bot sich bald, als Roemer durch ein Teleskop die Verfinsterung eines der Jupitermonde namens Io beobachtete. Der Zeitraum zwischen dem Eintritt in den Blackout und dem ersten Erscheinen dieses Planeten betrug etwa 42,5 Stunden. Und dieses Mal war alles ungefähr gleich vorläufige Berechnungen, durchgeführt nach bekannter Zeitraum Ios Appelle.

Einige Monate später führte Roemer sein Experiment erneut durch. Während dieser Zeit entfernte sich die Erde deutlich vom Jupiter. Und es stellte sich heraus, dass Io im Vergleich zu früheren Annahmen 22 Minuten zu spät kam, um sein Gesicht zu zeigen. Was bedeutete das? Die Erklärung war, dass der Satellit überhaupt keine Verzögerung hatte, aber die Lichtsignale von ihm brauchten einige Zeit, um eine beträchtliche Entfernung zur Erde zurückzulegen. Nach Berechnungen auf der Grundlage dieser Daten errechnete der Astronom, dass die Lichtgeschwindigkeit sehr wichtig ist und etwa 300.000 km/s beträgt.
Fizeaus Erfahrung
Fizeaus Experiment, das fast zwei Jahrhunderte später durchgeführt wurde, war ein Vorbote des relativistischen Gesetzes der Geschwindigkeitsaddition und bestätigte Roemers Vermutungen richtig. Erst der berühmte französische Physiker führte 1849 Laborexperimente durch. Und um sie umzusetzen, wurde ein kompletter optischer Mechanismus erfunden und entworfen, dessen Analogon in der folgenden Abbildung zu sehen ist.

Das Licht kam von der Quelle (dies war Stufe 1). Dann wurde es von der Platte reflektiert (Stufe 2) und durchquerte die Zähne des rotierenden Rades (Stufe 3). Als nächstes treffen die Strahlen auf einen Spiegel, der sich in beträchtlicher Entfernung befindet, gemessen bei 8,6 Kilometern (Stufe 4). Schließlich wurde das Licht zurückreflektiert und gelangte durch die Zähne des Rades (Schritt 5), gelangte in die Augen des Beobachters und wurde von ihm aufgezeichnet (Schritt 6).
Das Rad drehte sich mit unterschiedlicher Geschwindigkeit. Bei langsamer Bewegung war das Licht sichtbar. Mit zunehmender Geschwindigkeit begannen die Strahlen zu verschwinden, ohne den Betrachter zu erreichen. Der Grund dafür ist, dass die Balken einige Zeit brauchten, um sich zu bewegen, und während dieser Zeit bewegten sich die Zähne des Rades leicht. Als die Rotationsgeschwindigkeit wieder zunahm, gelangte das Licht wieder zum Auge des Betrachters, denn nun ließen die sich schneller bewegenden Zähne die Strahlen wieder durch die Lücken dringen.
SRT-Prinzipien
Die relativistische Theorie wurde erstmals 1905 von Einstein der Welt vorgestellt. Gewidmet diese Arbeit Beschreibung der Ereignisse, die in den meisten Fällen stattfinden verschiedene Systeme Ah Referenz, das Verhalten magnetischer und elektromagnetischer Felder, Partikel und Objekte, wenn sie sich bewegen, möglichst nahe an der Lichtgeschwindigkeit. Großartiger Physiker beschrieb die Eigenschaften von Zeit und Raum und berücksichtigte auch das Verhalten anderer Parameter, der Größe physikalischer Körper und ihrer Massen unter den angegebenen Bedingungen. Zu den Grundprinzipien zählte Einstein die Gleichheit jeglicher Trägheitsbezugssysteme, also die Ähnlichkeit der in ihnen ablaufenden Prozesse. Ein weiteres Postulat der relativistischen Mechanik ist das Additionsgesetz der Geschwindigkeiten in einer neuen, nichtklassischen Version.
Nach dieser Theorie wird der Raum als Leere dargestellt, in der alles andere funktioniert. Zeit wird als eine bestimmte Chronologie ablaufender Prozesse und Ereignisse definiert. Es heißt erstmals auch als vierte Dimension Der Raum selbst erhält nun den Namen „Raumzeit“.
Lorentz-Transformationen
Das relativistische Additionsgesetz der Lorentz-Transformationsraten wird bestätigt. Dies ist die gebräuchliche Bezeichnung für mathematische Formeln, die im Folgenden in ihrer endgültigen Fassung vorgestellt werden.

Diese mathematischen Beziehungen sind von zentraler Bedeutung für die Relativitätstheorie und dienen der Transformation von Koordinaten und Zeit, wobei sie für eine vierfache Raumzeit geschrieben werden. Die vorgestellten Formeln erhielten diesen Namen auf Vorschlag von Henri Poincaré, der bei der Entwicklung des mathematischen Apparats für die Relativitätstheorie einige Ideen von Lorentz entlehnte.
Solche Formeln beweisen nicht nur die Unmöglichkeit, die Überschallbarriere zu überwinden, sondern auch die Unantastbarkeit des Kausalitätsprinzips. Ihnen zufolge wurde es möglich, die Zeitdilatation, die Verkürzung der Länge von Objekten und andere Wunder, die in der Welt der ultrahohen Geschwindigkeiten geschehen, mathematisch zu belegen.
Geschwindigkeit ist ein quantitatives Merkmal der Körperbewegung.
Durchschnittsgeschwindigkeit ist eine physikalische Größe, die dem Verhältnis des Verschiebungsvektors des Punktes zur Zeitspanne Δt entspricht, während der diese Verschiebung auftrat. Die Richtung des Durcstimmt mit der Richtung des Verschiebungsvektors überein. Die Durchschnittsgeschwindigkeit wird durch die Formel bestimmt:
Momentane Geschwindigkeit, das heißt, die Geschwindigkeit zu einem bestimmten Zeitpunkt ist eine physikalische Größe, die der Grenze entspricht, zu der sie tendiert Durchschnittsgeschwindigkeit mit einer unendlichen Abnahme der Zeitspanne Δt:
Mit anderen Worten, die Momentangeschwindigkeit zu einem bestimmten Zeitpunkt ist das Verhältnis einer sehr kleinen Bewegung zu einem sehr kurzen Zeitraum, in dem diese Bewegung stattfand.
Der momentane Geschwindigkeitsvektor ist tangential zur Flugbahn des Körpers gerichtet (Abb. 1.6).

Reis. 1.6. Momentaner Geschwindigkeitsvektor.
Im SI-System wird die Geschwindigkeit in Metern pro Sekunde gemessen, das heißt, als Geschwindigkeitseinheit wird üblicherweise die Geschwindigkeit einer solchen Uniform angesehen geradlinige Bewegung, bei dem der Körper in einer Sekunde eine Strecke von einem Meter zurücklegt. Die Geschwindigkeitseinheit wird mit angegeben MS. Geschwindigkeit wird oft in anderen Einheiten gemessen. Zum Beispiel beim Messen der Geschwindigkeit eines Autos, eines Zuges usw. Die üblicherweise verwendete Einheit ist Kilometer pro Stunde: oder
Geschwindigkeitszugabe
Die Geschwindigkeiten der Körperbewegung in verschiedenen Bezugssystemen werden durch die Klassik miteinander verbunden Gesetz der Addition von Geschwindigkeiten.
Körpergeschwindigkeit relativ festen Bezugsrahmen gleich der Summe der Geschwindigkeiten des Körpers in bewegliches Bezugssystem und das mobilste Referenzsystem im Vergleich zum stationären.
Beispielsweise bewegt sich ein Personenzug mit einer Geschwindigkeit von 60 km/h auf der Bahnstrecke. Eine Person läuft mit einer Geschwindigkeit von 5 km/h am Waggon dieses Zuges entlang. Betrachten wir die Eisenbahn als stationär und nehmen sie als Bezugssystem, dann ist die Geschwindigkeit einer Person relativ zum Bezugssystem (also relativ zu Eisenbahn), ist gleich der Addition der Geschwindigkeiten des Zuges und der Person, also und
Dies gilt jedoch nur, wenn sich Person und Zug auf derselben Linie bewegen. Wenn sich eine Person in einem Winkel bewegt, muss sie diesen Winkel berücksichtigen und dabei bedenken, dass es sich um Geschwindigkeit handelt Anzahl der Vektoren.
Schauen wir uns nun das oben beschriebene Beispiel genauer an – mit Details und Bildern.
In unserem Fall ist es also die Eisenbahn festen Bezugsrahmen. Der Zug, der auf dieser Straße fährt, ist beweglicher Bezugsrahmen. Der Waggon, in dem sich die Person bewegt, ist Teil des Zuges.
Die Geschwindigkeit einer Person relativ zum Wagen (relativ zum bewegten Bezugssystem) beträgt 5 km/h. Bezeichnen wir es mit dem Buchstaben H.
Die Geschwindigkeit des Zuges (und damit des Waggons) relativ zu einem festen Bezugssystem (also relativ zur Eisenbahn) beträgt 60 km/h. Bezeichnen wir es mit dem Buchstaben B. Mit anderen Worten, die Geschwindigkeit des Zuges ist die Geschwindigkeit des sich bewegenden Bezugssystems relativ zum stationären Bezugssystem.
Die Geschwindigkeit eines Menschen relativ zur Eisenbahn (relativ zu einem festen Bezugssystem) ist uns noch unbekannt. Bezeichnen wir es mit dem Buchstaben .
Ordnen wir das XOY-Koordinatensystem dem festen Referenzsystem zu (Abb. 1.7) und das X P O P Y P-Koordinatensystem dem bewegten Referenzsystem (siehe auch Abschnitt Referenzsystem). Versuchen wir nun, die Geschwindigkeit einer Person relativ zu einem festen Bezugssystem, also relativ zur Eisenbahn, zu ermitteln.
Über einen kurzen Zeitraum Δt treten folgende Ereignisse auf:
Während dieses Zeitraums ist die Bewegung einer Person relativ zur Eisenbahn dann:
Das Gesetz der Addition von Verschiebungen. In unserem Beispiel ist die Bewegung einer Person relativ zur Eisenbahn gleich der Summe der Bewegungen der Person relativ zum Wagen und des Wagens relativ zur Eisenbahn.
Reis. 1.7. Das Gesetz der Addition von Verschiebungen.
Das Gesetz der Addition von Verschiebungen kann wie folgt geschrieben werden:
= Δ H Δt + Δ B Δt
Die Geschwindigkeit einer Person relativ zur Eisenbahn beträgt: Da

Die Geschwindigkeit einer Person relativ zum Wagen: Die Geschwindigkeit des Wagens relativ zur Eisenbahn: Daher ist die Geschwindigkeit der Person relativ zur Eisenbahn gleich: Das ist das Gesetz Geschwindigkeitszugabe:
av-physics.narod.ru
Relativität der Bewegung
Dieses Video-Tutorial ist im Abonnement erhältlich
Sie haben bereits ein Abonnement? Betreten

Ist es möglich, im Stillstand zu sein und sich trotzdem schneller zu bewegen als ein Formel-1-Auto? Es stellt sich heraus, dass es möglich ist. Jede Bewegung hängt von der Wahl des Bezugssystems ab, das heißt, jede Bewegung ist relativ. Das Thema der heutigen Lektion: „Relativität der Bewegung. Das Gesetz der Addition von Verschiebungen und Geschwindigkeiten. Wir lernen, wie man im gegebenen Fall ein Bezugssystem wählt und wie man die Verschiebung und Geschwindigkeit eines Körpers ermittelt.
Relativität der Bewegung
Unter mechanischer Bewegung versteht man die zeitliche Änderung der Position eines Körpers im Raum relativ zu anderen Körpern. Der Schlüsselbegriff in dieser Definition ist „relativ zu anderen Körpern“. Jeder von uns ist relativ zu jeder Oberfläche bewegungslos, aber relativ zur Sonne führen wir zusammen mit der gesamten Erde eine Umlaufbewegung mit einer Geschwindigkeit von 30 km/s aus, das heißt, die Bewegung hängt vom Bezugssystem ab.
Ein Referenzsystem ist eine Reihe von Koordinatensystemen und Uhren, die mit dem Körper verknüpft sind, relativ zu dem die Bewegung untersucht wird. Bei der Beschreibung der Bewegungen von Passagieren in einem Auto kann das Referenzsystem beispielsweise einem Straßencafé, dem Innenraum eines Autos oder einem entgegenkommenden Auto zugeordnet werden, wenn wir die Überholzeit schätzen (Abb. 1). .

Reis. 1. Auswahl des Referenzsystems
Was physikalische Quantitäten und Konzepte hängen von der Wahl des Bezugsrahmens ab?
1. Körperposition oder Koordinaten
Betrachten wir einen beliebigen Punkt. In verschiedenen Systemen hat es unterschiedliche Koordinaten (Abb. 2).

Reis. 2. Koordinaten eines Punktes in verschiedenen Koordinatensystemen
Betrachten Sie die Flugbahn eines Punktes auf einem Flugzeugpropeller in zwei Referenzsystemen: dem Referenzsystem des Piloten und dem Referenzsystem des Beobachters auf der Erde. Für den Piloten führt dieser Punkt eine kreisförmige Drehung aus (Abb. 3).

Reis. 3. Kreisdrehung
Während für einen Beobachter auf der Erde die Flugbahn dieses Punktes eine Schraubenlinie sein wird (Abb. 4). Offensichtlich hängt die Flugbahn von der Wahl des Bezugssystems ab.

Reis. 4. Spiralförmiger Pfad
Relativität der Flugbahn. Trajektorien der Körperbewegung in verschiedenen Bezugssystemen
Betrachten wir am Beispiel eines Problems, wie sich die Bewegungsbahn je nach Wahl des Bezugssystems ändert.
Wie verläuft die Flugbahn des Punktes am Ende des Propellers an verschiedenen Referenzpunkten?
1. Im CO, der dem Piloten des Flugzeugs zugeordnet ist.
2. Im CO, das mit dem Beobachter auf der Erde verbunden ist.
1. Weder der Pilot noch der Propeller bewegen sich relativ zum Flugzeug. Für den Piloten erscheint die Flugbahn des Punktes wie ein Kreis (Abb. 5).

Reis. 5. Flugbahn des Punktes relativ zum Piloten
2. Für einen Beobachter auf der Erde bewegt sich ein Punkt auf zwei Arten: rotierend und vorwärts bewegend. Die Flugbahn wird spiralförmig sein (Abb. 6).

Reis. 6. Flugbahn eines Punktes relativ zu einem Beobachter auf der Erde
Antwort : 1) Kreis; 2) Helix.
Am Beispiel dieses Problems waren wir davon überzeugt, dass die Flugbahn ein relatives Konzept ist.
Als unabhängigen Test empfehlen wir Ihnen, das folgende Problem zu lösen:
Wie verläuft die Flugbahn eines Punktes am Ende des Rades relativ zur Radmitte, wenn sich dieses Rad vorwärts bewegt, und relativ zu Punkten auf dem Boden (ein stationärer Beobachter)?
3. Bewegung und Weg
Stellen wir uns eine Situation vor, in der ein Floß schwimmt und irgendwann ein Schwimmer davon springt und versucht, zum gegenüberliegenden Ufer zu gelangen. Die Bewegung des Schwimmers relativ zum am Ufer sitzenden Fischer und relativ zum Floß wird unterschiedlich sein (Abb. 7).
Eine Bewegung relativ zum Boden wird als absolut bezeichnet, eine Bewegung relativ zu einem sich bewegenden Körper wird als relativ bezeichnet. Die Bewegung eines beweglichen Körpers (Floß) relativ zu einem stationären Körper (Fischer) wird als tragbar bezeichnet.

Reis. 7. Schwimmerbewegung
Aus dem Beispiel folgt, dass Weg und Weg relative Größen sind.
Anhand des vorherigen Beispiels können Sie leicht zeigen, dass Geschwindigkeit auch eine relative Größe ist. Geschwindigkeit ist schließlich das Verhältnis von Bewegung zu Zeit. Unsere Zeit ist die gleiche, aber unsere Reisen sind anders. Daher wird die Geschwindigkeit unterschiedlich sein.
Die Abhängigkeit der Bewegungseigenschaften von der Wahl des Bezugssystems nennt man Relativität der Bewegung.
In der Geschichte der Menschheit gab es dramatische Fälle, die gerade mit der Wahl eines Referenzsystems verbunden waren. Hinrichtung von Giordano Bruno, Abdankung Galileo Galilei– all dies sind Folgen des Kampfes zwischen den Anhängern des geozentrischen Bezugssystems und des heliozentrischen Bezugssystems. Für die Menschheit war es sehr schwierig, sich an die Vorstellung zu gewöhnen, dass die Erde überhaupt nicht das Zentrum des Universums, sondern ein ganz gewöhnlicher Planet ist. Und Bewegung kann nicht nur relativ zur Erde betrachtet werden, diese Bewegung wird absolut und relativ zur Sonne, zu Sternen oder anderen Körpern sein. Die Bewegung von Himmelskörpern in einem mit der Sonne verbundenen Bezugssystem zu beschreiben, ist viel bequemer und einfacher; dies wurde zuerst von Kepler und dann von Newton überzeugend gezeigt, der, basierend auf einer Betrachtung der Bewegung des Mondes um die Erde, leitete sein berühmtes Gesetz der universellen Gravitation ab.
Wenn wir sagen, dass Flugbahn, Weg, Verschiebung und Geschwindigkeit relativ sind, also von der Wahl des Bezugssystems abhängen, dann sagen wir das nicht über die Zeit. Im Rahmen der klassischen bzw. Newtonschen Mechanik ist die Zeit ein absoluter Wert, das heißt, sie fließt in allen Bezugssystemen gleichermaßen.
Überlegen wir, wie wir Verschiebung und Geschwindigkeit in einem Referenzsystem ermitteln können, wenn sie uns in einem anderen Referenzsystem bekannt sind.
Betrachten wir die vorherige Situation, wenn ein Floß schwimmt und irgendwann ein Schwimmer davon springt und versucht, zum gegenüberliegenden Ufer zu gelangen.
Wie hängt die Bewegung eines Schwimmers relativ zu einem stationären SO (verbunden mit dem Fischer) mit der Bewegung eines relativ beweglichen SO (verbunden mit dem Floß) zusammen (Abb. 8)?
Reis. 8. Illustration des Problems
Wir nannten Bewegung in einem stationären Bezugssystem. Aus dem Vektordreieck folgt das ![]() . Kommen wir nun dazu, die Beziehung zwischen den Geschwindigkeiten zu ermitteln. Erinnern wir uns daran, dass es im Rahmen der Newtonschen Mechanik um Zeit geht Absolutwert(Die Zeit verläuft in allen Bezugssystemen gleich). Das bedeutet, dass jeder Term aus der vorherigen Gleichung durch die Zeit geteilt werden kann. Wir bekommen:
. Kommen wir nun dazu, die Beziehung zwischen den Geschwindigkeiten zu ermitteln. Erinnern wir uns daran, dass es im Rahmen der Newtonschen Mechanik um Zeit geht Absolutwert(Die Zeit verläuft in allen Bezugssystemen gleich). Das bedeutet, dass jeder Term aus der vorherigen Gleichung durch die Zeit geteilt werden kann. Wir bekommen:
![]()
![]()
– das ist die Geschwindigkeit, mit der sich der Schwimmer für den Fischer bewegt;
– ist die eigene Geschwindigkeit des Schwimmers;
ist die Geschwindigkeit des Floßes (die Geschwindigkeit der Flussströmung).
Problem zum Additionsgesetz der Geschwindigkeiten
Betrachten wir das Gesetz der Addition von Geschwindigkeiten anhand eines Beispielproblems.
Zwei Autos bewegen sich aufeinander zu: das erste Auto mit hoher Geschwindigkeit, das zweite mit hoher Geschwindigkeit. Mit welcher Geschwindigkeit nähern sich die Autos einander an (Abb. 9)?

Reis. 9. Illustration des Problems
Wenden wir das Gesetz der Geschwindigkeitsaddition an. Gehen wir dazu vom üblichen CO der Erde zum CO des ersten Autos über. Dadurch bleibt das erste Auto stehen und das zweite bewegt sich mit Geschwindigkeit (Relativgeschwindigkeit) darauf zu. Mit welcher Geschwindigkeit dreht sich die Erde um das erste Auto, wenn das erste Auto stillsteht? Es dreht sich mit einer Geschwindigkeit und die Geschwindigkeit ist in Richtung der Geschwindigkeit des zweiten Wagens gerichtet (Übergangsgeschwindigkeit). Zwei Vektoren, die entlang derselben Geraden gerichtet sind, werden summiert. .
Antwort: .
Grenzen der Anwendbarkeit des Geschwindigkeitsadditionsgesetzes. Das Additionsgesetz der Geschwindigkeiten in der Relativitätstheorie
Lange Zeit glaubte man, dass das klassische Gesetz der Addition von Geschwindigkeiten immer gültig ist und für alle Bezugssysteme gilt. Vor etwa Jahren stellte sich jedoch heraus, dass dieses Gesetz in manchen Situationen nicht funktioniert. Betrachten wir diesen Fall anhand eines Beispielproblems.
Stellen Sie sich vor, Sie befinden sich in einer Weltraumrakete, die sich mit einer Geschwindigkeit von 50 km/h bewegt. Und der Kapitän Weltraumrakete schaltet die Taschenlampe in Bewegungsrichtung der Rakete ein (Abb. 10). Die Geschwindigkeit der Lichtausbreitung im Vakuum beträgt . Wie hoch wird die Lichtgeschwindigkeit für einen stationären Beobachter auf der Erde sein? Wird sie der Summe der Lichtgeschwindigkeiten und der Geschwindigkeit der Rakete entsprechen?

Reis. 10. Illustration des Problems
Tatsache ist, dass die Physik hier mit zwei widersprüchlichen Konzepten konfrontiert ist. Einerseits ist nach Maxwells Elektrodynamik die maximale Geschwindigkeit die Lichtgeschwindigkeit und beträgt . Andererseits ist Zeit nach der Newtonschen Mechanik ein absoluter Wert. Das Problem wurde gelöst, als Einstein die spezielle Relativitätstheorie bzw. deren Postulate vorschlug. Er war der erste, der darauf hinwies, dass die Zeit nicht absolut ist. Das heißt, irgendwo fließt es schneller und irgendwo langsamer. Natürlich bemerken wir in unserer Welt niedrige Geschwindigkeiten nicht dieser Effekt. Um diesen Unterschied zu spüren, müssen wir uns mit Geschwindigkeiten nahe der Lichtgeschwindigkeit bewegen. Basierend auf Einsteins Schlussfolgerungen wurde das Additionsgesetz der Geschwindigkeiten in der speziellen Relativitätstheorie ermittelt. Es sieht aus wie das:
– ist die Geschwindigkeit relativ zum stationären CO;
– ist die Geschwindigkeit relativ zum sich bewegenden CO;
ist die Geschwindigkeit des sich bewegenden CO relativ zum stationären CO.
Wenn wir die Werte aus unserem Problem ersetzen, finden wir, dass die Lichtgeschwindigkeit für einen stationären Beobachter auf der Erde beträgt.
Die Kontroverse wurde gelöst. Sie können auch sicherstellen, dass, wenn die Geschwindigkeiten im Vergleich zur Lichtgeschwindigkeit sehr klein sind, die Formel der Relativitätstheorie zur klassischen Formel für die Addition von Geschwindigkeiten wird.
In den meisten Fällen verwenden wir das klassische Gesetz.
Abschluss
Heute haben wir herausgefunden, dass Bewegung vom Bezugssystem abhängt, dass Geschwindigkeit, Weg, Bewegung und Flugbahn relative Konzepte sind. Und Zeit ist im Rahmen der klassischen Mechanik ein absoluter Begriff. Durch die Analyse einiger typischer Beispiele lernten wir, das erworbene Wissen anzuwenden.
- Tikhomirova S.A., Yavorsky B.M. Physik (Grundniveau) - M.: Mnemosyne, 2012.
- Gendenshtein L.E., Dick Yu.I. Physik 10. Klasse. – M.: Mnemosyne, 2014.
- Kikoin I.K., Kikoin A.K. Physik - 9, Moskau, Bildung, 1990.
- Internetportal Class-fizika.narod.ru (Quelle).
- Internetportal Nado5.ru (Quelle).
- Internetportal Fizika.ayp.ru (Quelle).
- Definieren Sie die Relativität der Bewegung.
- Welche physikalischen Größen hängen von der Wahl des Bezugssystems ab?
Das Gesetz der Addition von Verschiebungen und Geschwindigkeiten
Lassen Sie ein Motorboot auf dem Fluss schwimmen und wir kennen seine Geschwindigkeit relativ zum Wasser, oder genauer gesagt, relativ zum Bezugssystem K1, das sich mit dem Wasser bewegt.
Ein solcher Bezugsrahmen kann beispielsweise mit einem Ball in Verbindung gebracht werden, der aus einem Boot fällt und in der Strömung schwimmt. Wenn auch die Geschwindigkeit der Flussströmung relativ zum dem Ufer zugeordneten Bezugssystem K2 bekannt ist, also die Geschwindigkeit des Bezugssystems K1 relativ zum Bezugssystem K2, dann kann die Geschwindigkeit des Bootes relativ zum Ufer ermittelt werden bestimmt (Abb. 1.20).
Über einen bestimmten Zeitraum sind die Bewegungen des Bootes und des Balls relativ zum Ufer gleich und (Abb. 1.20) und die Bewegung des Bootes relativ zum Ball ist gleich. Aus Abbildung 1.21 ist das ersichtlich
Wenn wir die linke und rechte Seite der Gleichung (1.8) durch dividieren, erhalten wir
Berücksichtigen wir auch, dass die Verhältnisse von Verschiebungen zu Zeitintervallen gleich den Geschwindigkeiten sind. Deshalb
Die Geschwindigkeiten addieren sich wie alle anderen Vektoren geometrisch.
Wir haben ein einfaches und bemerkenswertes Ergebnis erhalten, das als Additionsgesetz der Geschwindigkeiten bezeichnet wird: Wenn sich ein Körper relativ zu einem bestimmten Bezugssystem K1 mit Geschwindigkeit bewegt und sich das Bezugssystem K1 selbst relativ zu einem anderen Bezugssystem K2 mit Geschwindigkeit bewegt, dann gilt: Die Geschwindigkeit des Körpers relativ zum zweiten Bezugssystem ist gleich der geometrischen Summe der Geschwindigkeiten und. Das Gesetz der Geschwindigkeitsaddition gilt auch für ungleichmäßige Bewegungen. In diesem Fall werden die Momentangeschwindigkeiten addiert.
Wie jede Vektorgleichung ist Gleichung (1.9) eine kompakte Darstellung skalarer Gleichungen, in diesem Fall zum Addieren von Projektionen von Bewegungsgeschwindigkeiten auf einer Ebene:
Die Geschwindigkeitsprojektionen werden algebraisch addiert.
Das Gesetz der Addition von Geschwindigkeiten ermöglicht es, die Geschwindigkeit eines Körpers relativ zu verschiedenen Bezugssystemen zu bestimmen, die sich relativ zueinander bewegen.
Selbstlernaufgabe:
1. Bereiten Sie sich auf die Beantwortung der folgenden Fragen vor.
1) Formulieren Sie das Additionsgesetz der Geschwindigkeiten.
2) Was ermöglicht es uns, das Gesetz der Addition von Geschwindigkeiten zu bestimmen?
2. Testaufgaben erledigen und Probleme lösen.
1) Bsp. 2(1,2) (Myakishev G.Ya., Bukhovtsev B.B., Sotsky N.N. Physik. 10. Klasse: Lehrbuch für Bildungseinrichtungen: Grundlagen und Profilebenen. – M: Aufklärung, 2014)
2) Nr. 41, 42, 44 (Parfentyeva N.A. Sammlung von Problemen in den Physikklassen 10-11: ein Handbuch für Schüler allgemeinbildender Organisationen: Grund- und Spezialniveau. - M: Prosveshchenie, 2014)
3) Prüfung 10.1.1 Nr. 18.24
3. Grundlegende Literatur.
1) Myakishev G.Ya., Bukhovtsev B.B., Sotsky N.N. Physik. Klasse 10: Lehrbuch für allgemeinbildende Organisationen: Grund- und Spezialniveau. – M: Aufklärung, 2014
2) Parfentyeva N.A. Sammlung von Problemen in den Physikklassen 10-11: ein Handbuch für Studierende allgemeinbildender Organisationen: Grund- und Spezialniveau. – M: Aufklärung, 2014
Addition von Geschwindigkeiten und Übergang zu einem anderen Bezugssystem bei Bewegung entlang einer Geraden
1. Addition von Geschwindigkeiten
Einige Probleme berücksichtigen die Bewegung eines Körpers relativ zu einem anderen Körper, der sich ebenfalls in einem ausgewählten Bezugssystem bewegt. Schauen wir uns ein Beispiel an.
Ein Floß schwimmt auf dem Fluss, und eine Person geht in Flussrichtung entlang des Floßes – in die Richtung, in der das Floß schwimmt (Abb. 3.1, a). Mithilfe einer auf dem Floß montierten Stange ist es möglich, sowohl die Bewegung des Floßes relativ zum Ufer als auch die Bewegung einer Person relativ zum Floß zu markieren.
Bezeichnen wir die Geschwindigkeit einer Person relativ zum Floß mit pb und die Geschwindigkeit des Floßes relativ zum Ufer mit pb. (Üblicherweise wird davon ausgegangen, dass die Geschwindigkeit des Floßes relativ zum Ufer gleich der Geschwindigkeit der Flussströmung ist. Wir werden die Geschwindigkeit und Bewegung von Körper 1 relativ zu Körper 2 mit zwei Indizes bezeichnen: Der erste Index bezieht sich auf Körper 1 , und der zweite an Körper 2. Beispielsweise bezeichnet 12 die Geschwindigkeit des Körpers 1 relativ zu Körper 2.)
Betrachten wir die Bewegungen einer Person und eines Floßes über einen bestimmten Zeitraum t.
Bezeichnen wir mit PB die Bewegung des Floßes relativ zum Ufer und mit pm die Bewegung einer Person relativ zum Floß (Abb. 3.1, b).
Verschiebungsvektoren sind in den Abbildungen mit gepunkteten Pfeilen dargestellt, um sie von Geschwindigkeitsvektoren zu unterscheiden, die mit durchgezogenen Pfeilen dargestellt sind.
Die Bewegung einer bw-Person relativ zum Ufer ist gleich der Vektorsumme der Bewegung der Person relativ zum Floß und der Bewegung des Floßes relativ zum Ufer (Abb. 3.1, c):
Bw = pb + bp (1)
Verbinden wir nun die Bewegungen mit Geschwindigkeiten und dem Zeitintervall t. Wir bekommen:
Chp = chp t, (2)
pb = pbt, (3)
bw = bw t, (4)
Dabei ist bw die Geschwindigkeit einer Person relativ zum Ufer.
Wenn wir die Formeln (2–4) in Formel (1) einsetzen, erhalten wir:
Bw t = pb t + bp t.
Reduzieren wir beide Seiten dieser Gleichung um t und erhalten:
Bw = pb + chp. (5)
Geschwindigkeitsadditionsregel
Beziehung (5) ist die Regel zum Addieren von Geschwindigkeiten. Es ist eine Folge der Addition von Verschiebungen (siehe Abb. 3.1, c, unten). IN Gesamtansicht Die Regel zum Hinzufügen von Geschwindigkeiten sieht folgendermaßen aus:
1 = 12 + 2 . (6)
Dabei sind 1 und 2 die Geschwindigkeiten der Körper 1 und 2 im selben Bezugssystem und 12 die Geschwindigkeit von Körper 1 relativ zu Körper 2.
Die Geschwindigkeit 1 von Körper 1 in einem bestimmten Bezugssystem ist also gleich der Vektorsumme der Geschwindigkeit 12 von Körper 1 relativ zu Körper 2 und der Geschwindigkeit 2 von Körper 2 im selben Bezugssystem.
Im oben diskutierten Beispiel waren die Geschwindigkeit der Person relativ zum Floß und die Geschwindigkeit des Floßes relativ zum Ufer in die gleiche Richtung. Betrachten wir nun den Fall, dass sie in die entgegengesetzte Richtung gerichtet sind. Vergessen Sie nicht, dass die Geschwindigkeiten nach der Regel der Vektoraddition addiert werden müssen!
1. Ein Mann geht auf einem Floß gegen die Strömung entlang (Abb. 3.2). Machen Sie in Ihrem Notizbuch eine Zeichnung, anhand derer Sie die Geschwindigkeit einer Person relativ zum Ufer ermitteln können. Maßstab für den Geschwindigkeitsvektor: zwei Zellen entsprechen 1 m/s.
Bei der Lösung von Problemen, bei denen es um die Bewegung von Booten oder Schiffen auf einem Fluss oder den Flug eines Flugzeugs bei Wind geht, ist es notwendig, Geschwindigkeiten hinzufügen zu können. Dabei fließendes Wasser oder sich bewegende Luft kann man sich als ein „Floß“ vorstellen, das sich mit konstanter Geschwindigkeit relativ zum Boden bewegt und Schiffe, Flugzeuge usw. „trägt“.
Beispielsweise ist die Geschwindigkeit eines auf einem Fluss schwimmenden Bootes relativ zum Ufer gleich der Vektorsumme der Geschwindigkeit des Bootes relativ zum Wasser und der Geschwindigkeit der Flussströmung.
2. Die Geschwindigkeit eines Motorbootes relativ zum Wasser beträgt 8 km/h und die Strömungsgeschwindigkeit beträgt 4 km/h. Wie lange braucht das Boot für die Fahrt von Pier A zu Pier B und zurück, wenn die Entfernung zwischen ihnen 12 km beträgt?
3. Ein Floß und ein Motorboot stechen gleichzeitig vom Pier A aus in See. In der Zeit, die das Boot bis zum Pier B brauchte, hatte das Floß ein Drittel dieser Strecke zurückgelegt.
a) Wie oft ist die Geschwindigkeit des Bootes relativ zum Wasser größer als die Geschwindigkeit der Strömung?
b) Wie oft dauert es, bis das Boot von B nach A fährt, als von A nach B?
4. Das Flugzeug flog mit Rückenwind in 1,5 Stunden von Stadt M nach Stadt N. Der Rückflug bei Gegenwind dauerte 1 Stunde 50 Minuten. Die Geschwindigkeit des Flugzeugs relativ zur Luft und die Windgeschwindigkeit blieben konstant.
a) Wie oft ist die Geschwindigkeit des Flugzeugs relativ zur Luft größer als die Windgeschwindigkeit?
b) Wie lange würde es dauern, bei ruhigem Wetter von M nach N zu fliegen?
2. Übergang zu einem anderen Referenzsystem
Es ist viel einfacher, die Bewegung zweier Körper zu verfolgen, wenn Sie zu dem Referenzrahmen wechseln, der einem dieser Körper zugeordnet ist. Der Körper, mit dem das Referenzsystem verbunden ist, ruht relativ zu ihm, sodass Sie nur den anderen Körper überwachen müssen.
Ein Motorboot überholt ein auf dem Fluss schwimmendes Floß. Eine Stunde später dreht sie um und schwimmt zurück. Die Geschwindigkeit des Bootes relativ zum Wasser beträgt 8 km/h, die Strömungsgeschwindigkeit beträgt 2 km/h. Wie lange nach der Wende trifft das Boot auf das Floß?
Wenn wir dieses Problem in einem mit dem Ufer verbundenen Bezugssystem lösen, müssten wir die Bewegung zweier Körper überwachen – des Floßes und des Bootes – und auch berücksichtigen, dass die Geschwindigkeit des Bootes relativ zum Ufer davon abhängt Geschwindigkeit des Stroms.
Gehen wir zum Bezugssystem des Floßes, dann „stoppen“ das Floß und der Fluss: Schließlich bewegt sich das Floß genau mit der Geschwindigkeit der Strömung entlang des Flusses. Daher geschieht in diesem Bezugssystem alles wie in einem See ohne Strömung: Das Boot schwimmt mit der gleichen absoluten Geschwindigkeit vom Floß zum Floß! Und da sie für eine Stunde weggezogen ist, wird sie in einer Stunde zurücksegeln.
Wie Sie sehen, waren zur Lösung des Problems weder die Geschwindigkeit der Strömung noch die Geschwindigkeit des Bootes erforderlich.
5. Als ein Mann mit einem Boot unter einer Brücke hindurchfuhr, ließ er seinen Strohhut ins Wasser fallen. Eine halbe Stunde später entdeckte er den Verlust, schwamm zurück und fand in 1 km Entfernung von der Brücke einen schwimmenden Hut. Zunächst schwamm das Boot mit der Strömung und seine Geschwindigkeit relativ zum Wasser betrug 6 km/h.
Gehen Sie zum Bezugsrahmen des Hutes (Abbildung 3.3) und beantworten Sie die folgenden Fragen.
a) Wie lange ist der Mann zum Hut geschwommen?
b) Wie groß ist die Strömungsgeschwindigkeit?
c) Welche Informationen in der Bedingung werden zur Beantwortung dieser Fragen nicht benötigt?
6. Eine Fußkolonne von 200 m Länge bewegt sich auf einer geraden Straße mit einer Geschwindigkeit von 1 m/s. Der Kommandant an der Spitze der Kolonne schickt einen Reiter mit einem Befehl zum Nachläufer. Wie lange braucht der Reiter für den Rückweg, wenn er mit einer Geschwindigkeit von 9 m/s galoppiert?
Lassen Sie uns ableiten allgemeine Formel um die Geschwindigkeit eines Körpers in einem Referenzsystem zu ermitteln, das mit einem anderen Körper verbunden ist. Dazu verwenden wir die Regel der Geschwindigkeitsaddition.
Denken Sie daran, dass es durch die Formel ausgedrückt wird
1 = 2 + 12 , (7)
Dabei ist 12 die Geschwindigkeit von Körper 1 relativ zu Körper 2.
Schreiben wir Formel (1) im Formular um
12 = 1 – 2 , (8)
Dabei ist 12 die Geschwindigkeit von Körper 1 im Bezugssystem, das Körper 2 zugeordnet ist.
Mit dieser Formel können Sie die Geschwindigkeit 12 von Körper 1 relativ zu Körper 2 ermitteln, wenn die Geschwindigkeit 1 von Körper 1 und die Geschwindigkeit 2 von Körper 2 bekannt sind.
7. Abbildung 3.4 zeigt drei Autos, deren Geschwindigkeiten auf einer Skala angegeben sind: Zwei Zellen entsprechen einer Geschwindigkeit von 10 m/s.
Finden:
a) die Geschwindigkeit der blauen und violetten Autos im Referenzrahmen, der dem roten Auto zugeordnet ist;
b) die Geschwindigkeit des blauen und des roten Autos im Bezugssystem, das dem violetten Auto zugeordnet ist;
c) die Geschwindigkeit der roten und violetten Autos im Referenzrahmen, der dem blauen Auto zugeordnet ist;
d) Welche der gefundenen Geschwindigkeiten ist im absoluten Wert die größte? Kleinste?
Zusätzliche Fragen und Aufgaben
8. Ein Mann ging ein Floß der Länge b entlang und kehrte zum Ausgangspunkt zurück. Die Geschwindigkeit einer Person relativ zum Floß ist immer entlang des Flusses gerichtet und hat den Wert vh, und die Strömungsgeschwindigkeit ist gleich vt. Finden Sie einen Ausdruck für den Weg, den eine Person relativ zum Ufer zurücklegt, wenn:
a) zunächst ging die Person in Richtung der Strömung;
b) Die Person ging zunächst entgegen der Strömungsrichtung (berücksichtigen Sie alle möglichen Fälle!).
c) Finden Sie den gesamten Weg, den die Person relativ zum Ufer zurückgelegt hat: 1) bei b = 30 m, v h = 1,5 m/s, v t = 1 m/s; 2) bei b = 30 m, v h = 0,5 m/s, v t = 1 m/s.
9. Ein Fahrgast in einem fahrenden Zug bemerkte, dass im Abstand von 6 Minuten zwei entgegenkommende Züge an seinem Fenster vorbeirasten. In welchem Abstand passierten sie den Bahnhof? Die Geschwindigkeit des Zuges beträgt 100 km/h, die Geschwindigkeit der Elektrozüge beträgt 60 km/h.
10. Zwei Personen begannen gleichzeitig, die Rolltreppe hinunterzusteigen. Der erste stand auf einer Stufe. Mit welcher Geschwindigkeit lief die zweite Person die Rolltreppe hinunter, wenn sie dreimal schneller herunterkam als die erste Person? Rolltreppengeschwindigkeit 0,5 m/s.
1.4. Relativität der Bewegung
1.4.1. Das Gesetz der Addition von Verschiebungen und das Gesetz der Addition von Geschwindigkeiten
Mechanisches Uhrwerk Derselbe Körper sieht für unterschiedliche Bezugssysteme unterschiedlich aus.
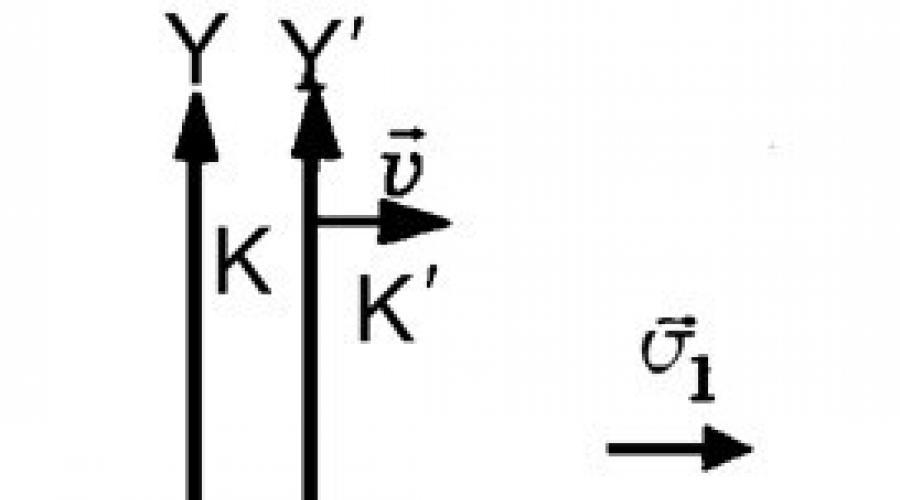
Der Eindeutigkeit halber verwenden wir zwei Bezugssysteme (Abb. 1.33):
- K – fester Bezugsrahmen;
- K′ – beweglicher Bezugsrahmen.
Reis. 1.33
Das System K′ bewegt sich relativ zum Bezugssystem K in positiver Richtung der Ox-Achse mit der Geschwindigkeit u →.
Im Bezugssystem K bewege sich ein materieller Punkt (Körper) mit der Geschwindigkeit v → und mache im Zeitintervall ∆t eine Bewegung Δ r → . Relativ zum Bezugssystem K′ hat dieser materielle Punkt eine Geschwindigkeit v →′ und bewegt sich während des angegebenen Zeitintervalls ∆t um Δ r′ →.
Gesetz der Addition von Verschiebungen
Die Verschiebungen eines materiellen Punktes in einem stationären (K) und einem bewegten (K ′) Bezugssystem (Δ r → bzw. Δ r ′ →) unterscheiden sich voneinander und stehen in Zusammenhang Gesetz der Addition von Verschiebungen:
Δ r → = Δ r ′ → + u → Δ t,
wobei Δ r → die Bewegung eines materiellen Punktes (Körpers) über ein Zeitintervall ∆t in einem stationären Bezugssystem K ist; Δ r ′ → - Bewegung eines materiellen Punktes (Körpers) über ein Zeitintervall ∆t in einem bewegten Referenzrahmen K ′; u → ist die Geschwindigkeit des Referenzrahmens K′, der sich relativ zum Referenzrahmen K bewegt.
Das Gesetz der Addition von Verschiebungen entspricht „ Verschiebungsdreieck"(Abb. 1.34).

Manchmal empfiehlt es sich, das Gesetz der Addition von Verschiebungen bei der Lösung von Problemen einzuschreiben Koordinatenform:
Δ x = Δ x ′ + u x Δ t , Δ y = Δ y ′ + u y Δ t , )
wobei ∆x und ∆y die Änderung der Koordinaten x und y des materiellen Punktes (Körpers) über das Zeitintervall ∆t im Bezugssystem K sind; ∆x ′ und ∆y ′ – Änderung der entsprechenden Koordinaten des materiellen Punktes (Körpers) über das Zeitintervall ∆t im Referenzsystem K ′; u x und u y sind Projektionen der sich relativ zum Bezugssystem K bewegenden Geschwindigkeit u → Bezugssystem K ′ auf die Koordinatenachsen.
Gesetz der Addition von Geschwindigkeiten
Auch die Geschwindigkeiten eines materiellen Punktes in einem stationären (K) und einem bewegten (K ′) Bezugssystem (v → bzw. v → ′) unterscheiden sich voneinander und stehen in Zusammenhang Gesetz der Addition von Geschwindigkeiten:
v → = v → ′ + u → ,
wobei u → die Geschwindigkeit des Referenzrahmens K′ ist, der sich relativ zum Referenzrahmen K bewegt.
Das Gesetz der Geschwindigkeitsaddition entspricht „ Geschwindigkeitsdreieck"(Abb. 1.35).

Reis. 1,35
Bei der Lösung von Problemen empfiehlt es sich manchmal, das Additionsgesetz der Geschwindigkeiten aufzuschreiben Projektionen auf Koordinatenachsen:
v x = v ′ x + u x , v y = v ′ y + u y , )
Relativgeschwindigkeit zweier Körper
Zur Bestimmung relative Geschwindigkeit Für die Bewegung zweier Körper ist es zweckmäßig, den folgenden Algorithmus zu verwenden:
4) stellen Sie die Vektoren v → , v → ′ und u → im xOy-Koordinatensystem dar;
5) Schreiben Sie das Gesetz der Geschwindigkeitsaddition in die Form
v → = v → ′ + u → oder v x = v ′ x + u x , v y = v ′ y + u y ; )
6) v → ′ ausdrücken:
v → ′ = v → − u →
oder v ′ x und v ′ y:
v ′ x = v x − u x , v ′ y = v y − u y ; )
7) Ermitteln Sie die Größe des Relativgeschwindigkeitsvektors v → ′ mithilfe der Formel
v ′ = v ′ x 2 + v ′ y 2 ,
wobei v x und v y Projektionen des Geschwindigkeitsvektors v → materieller Punkt (Körper) im Bezugssystem K auf die Koordinatenachsen sind; v ′ x und v ′ y – Projektionen des Geschwindigkeitsvektors v → ′ eines materiellen Punktes (Körpers) im Referenzsystem K ′ auf die Koordinatenachsen; u x und u y sind Projektionen der sich relativ zum Bezugssystem K bewegenden Geschwindigkeit u → Bezugssystem K ′ auf die Koordinatenachsen.
Bestimmung der relativen Geschwindigkeit zweier sich bewegender Körper entlang einer Koordinatenachse, ist es praktisch, den folgenden Algorithmus zu verwenden:
1) Finden Sie heraus, welcher Körper als Referenzsystem gilt; die Geschwindigkeit dieses Körpers wird mit u → bezeichnet;
2) bezeichnen die Geschwindigkeit des zweiten Körpers als v → ;
3) die relative Geschwindigkeit der Körper wird als v → ′ bezeichnet;
4) Vektoren v → , v → ′ und u → dargestellt auf der Koordinatenachse Ox;
5) Schreiben Sie das Gesetz der Geschwindigkeitsaddition in der Form auf:
v x = v ′ x + u x ;
6) v ′ x ausdrücken:
v ′ x = v x − u x ;
7) Ermitteln Sie die Größe des Relativgeschwindigkeitsvektors v → mithilfe der Formel
v′ = | v ′ x | ,
wobei v x und v y Projektionen des Geschwindigkeitsvektors v → materieller Punkt (Körper) im Bezugssystem K auf die Koordinatenachsen sind; v ′ x und v ′ y – Projektionen des Geschwindigkeitsvektors v → ′ eines materiellen Punktes (Körpers) im Referenzsystem K ′ auf die Koordinatenachsen; u x und u y sind Projektionen der sich relativ zum Bezugssystem K bewegenden Geschwindigkeit u → Bezugssystem K ′ auf die Koordinatenachsen.
Beispiel 26. Der erste Körper bewegt sich mit einer Geschwindigkeit von 6,0 m/s in die positive Richtung der Ox-Achse und der zweite Körper bewegt sich mit einer Geschwindigkeit von 8,0 m/s in die negative Richtung. Bestimmen Sie den Geschwindigkeitsmodul des ersten Körpers im Referenzrahmen, der dem zweiten Körper zugeordnet ist.
Lösung. Der bewegliche Bezugsrahmen ist der zweite Körper; die Projektion der Geschwindigkeit u → des bewegten Bezugssystems auf die Ox-Achse ist gleich:
u x = −8,0 m/s,
da die Bewegung des zweiten Körpers in der negativen Richtung der angegebenen Achse erfolgt.
Der erste Körper hat eine Geschwindigkeit v → relativ zu einem festen Bezugssystem; seine Projektion auf die Ox-Achse ist gleich:
v x = 6,0 m/s,
da die Bewegung des ersten Körpers in der positiven Richtung der angegebenen Achse erfolgt.
Um dieses Problem zu lösen, empfiehlt es sich, das Additionsgesetz der Geschwindigkeiten in Projektion auf die Koordinatenachse zu schreiben, d.h. in folgender Form:
v x = v ′ x + u x ,
wobei v ′ x die Projektion der Geschwindigkeit des ersten Körpers relativ zum sich bewegenden Bezugssystem (dem zweiten Körper) ist.
Die Größe v ′ x ist die gewünschte; sein Wert wird durch die Formel bestimmt
v ′ x = v x − u x .
Machen wir die Rechnung:
v ′ x = 6,0 − (− 8,0) = 14 m/s.
Beispiel 29. Sportler laufen in einer 46 m langen Kette mit gleicher Geschwindigkeit hintereinander her. Der Trainer rennt mit einer Geschwindigkeit auf sie zu, die dreimal geringer ist als die Geschwindigkeit der Athleten. Nachdem jeder Athlet den Trainer eingeholt hat, dreht er sich um und rennt mit der gleichen Geschwindigkeit zurück. Wie lang ist die Kette, wenn alle Athleten in die entgegengesetzte Richtung laufen?
Lösung. Lassen Sie die Bewegung der Athleten und des Trainers entlang der Ox-Achse erfolgen, deren Anfang mit der Position des letzten Athleten zusammenfällt. Dann haben die Bewegungsgleichungen relativ zur Erde folgende Form:
- der letzte Athlet -
x 1 (t) = vt;
- Trainer -
x 2 (t) = L − 1 3 v t ;
- der erste Athlet -
x 3 (t) = L − vt,
wobei v das Geschwindigkeitsmodul jedes Athleten ist; 1 3 V - Trainer-Geschwindigkeitsmodul; L ist die Anfangslänge der Kette; t – Zeit.
Verbinden wir den beweglichen Bezugsrahmen mit dem Trainer.
Bezeichnen wir die Bewegungsgleichung des letzten Sportlers relativ zum sich bewegenden Bezugssystem (Trainer) als x ′(t) und finden sie aus dem in Koordinatenform geschriebenen Gesetz der Addition von Verschiebungen:
x (t) = x ′(t) + X (t), d.h. x ′(t) = x(t) − X(t),
X (t) = x 2 (t) = L − 1 3 v t -
Bewegungsgleichung des Trainers (bewegter Bezugsrahmen) relativ zur Erde;
x (t) = x 1 (t) = vt;
Bewegungsgleichung des letzten Athleten relativ zur Erde.
Das Einsetzen der Ausdrücke x (t), X (t) in die geschriebene Gleichung ergibt:
x ′ (t) = x 1 (t) − x 2 (t) = v t − (L − 1 3 v t) = 4 3 v t − L .
Diese Gleichung stellt die Bewegungsgleichung des letzten Athleten relativ zum Trainer dar. Im Moment des Treffens des letzten Athleten und Trainers (t = t 0) wird ihre relative Koordinate x ′ (t 0) Null:
4 3 v t 0 − L = 0 .
Mit der Gleichung können Sie den angegebenen Zeitpunkt ermitteln:
Zu diesem Zeitpunkt beginnen alle Athleten, in die entgegengesetzte Richtung zu laufen. Die Länge der Athletenkette wird durch die Differenz der Koordinaten des ersten x 3 (t 0) und des letzten x 1 (t 0) Athleten zum angegebenen Zeitpunkt bestimmt:
l = | x 3 (t 0) − x 1 (t 0) | ,
oder explizit:
l = | (L − v t 0) − v t 0 | = | L − 2 v t 0 | = | L − 2 v 3 L 4 v | = 0,5 L = 0,5 ⋅ 46 = 23 m.