Care este esența legii adunării vitezelor de mișcare? Legea adunării vitezei la o sută
Citeste si
Articolul principal: Teorema adiției vitezei
În mecanica clasică, viteza absolută a unui punct este egală cu suma vectorială a vitezelor sale relative și portabile:
Această egalitate reprezintă conținutul enunțului teoremei privind adăugarea vitezelor.
In termeni simpli: Viteza de mișcare a unui corp în raport cu un cadru de referință fix este egală cu suma vectorială a vitezei acestui corp în raport cu un cadru de referință în mișcare și viteza (față de un cadru fix) acelui punct al cadrului în mișcare de referinţă la care acest moment momentul în care corpul este localizat.
( adică cu care înregistrarea o poartă datorită rotaţiei sale).
2. Dacă o persoană merge de-a lungul coridorului unei trăsuri cu o viteză de 5 kilometri pe oră în raport cu trăsura, iar trăsura se mișcă cu o viteză de 50 de kilometri pe oră față de Pământ, atunci persoana se mișcă în raport cu Pământul cu o viteză de 50 + 5 = 55 de kilometri pe oră când merge pe sensul de deplasare a trenului și cu o viteză de 50 - 5 = 45 de kilometri pe oră când merge în sens opus. Dacă o persoană din coridorul vagonului se deplasează în raport cu Pământul cu o viteză de 55 de kilometri pe oră, iar un tren cu o viteză de 50 de kilometri pe oră, atunci viteza persoanei în raport cu trenul este de 55 - 50 = 5 kilometri pe ora.
3. Dacă valurile se mișcă față de țărm cu o viteză de 30 de kilometri pe oră, iar nava se deplasează și cu o viteză de 30 de kilometri pe oră, atunci valurile se mișcă față de navă cu o viteză de 30 - 30 = 0 kilometri pe oră, adică devin nemișcați în raport cu nava.
Din formula pentru accelerații rezultă că, dacă un sistem de referință în mișcare se mișcă față de primul fără accelerație, adică atunci accelerația corpului față de ambele sisteme de referință este aceeași.
Întrucât în dinamica newtoniană, a mărimilor cinematice, accelerația este cea care joacă un rol (vezi a doua lege a lui Newton), atunci dacă este destul de firesc să presupunem că forțele depind doar de poziția relativă și de vitezele corpurilor fizice (și nu ale acestora). poziția relativă la originea abstractă), se dovedește că toate ecuațiile mecanicii vor fi scrise identic în orice sistem de referință inerțial - cu alte cuvinte, legile mecanicii nu depind de care dintre sistemele de referință inerțiale le studiem, nu depind de alegerea unui sistem de referință inerțial specific ca cel de lucru.
De asemenea - prin urmare - mișcarea observată a corpurilor nu depinde de o astfel de alegere a sistemului de referință (ținând cont, desigur, de vitezele inițiale). Această afirmație este cunoscută ca Principiul relativității lui Galileo, spre deosebire de Principiul relativității al lui Einstein
Acest principiu este formulat diferit (urmând Galileo) după cum urmează:
Dacă în două laboratoare închise, dintre care unul se mișcă uniform rectiliniu (și translațional) față de celălalt, se efectuează același experiment mecanic, rezultatul va fi același.
Cerința (postulatul) principiului relativității, împreună cu transformările galileene, care par destul de evidente intuitiv, urmează în mare măsură forma și structura mecanicii newtoniene (și istoric au avut și o influență semnificativă asupra formulării acesteia). Vorbind ceva mai formal, ele impun restricții asupra structurii mecanicii care influențează destul de semnificativ posibilele sale formulări, care din punct de vedere istoric au contribuit foarte mult la proiectarea acesteia.
Centrul de masă al unui sistem de puncte materiale
Poziția centrului de masă (centrul de inerție) al unui sistem de puncte materiale în mecanica clasică este determinată în felul următor:
unde este vectorul rază al centrului de masă, este vectorul rază i al-lea punct al sistemului este masa i al-lea punct.
Pentru cazul distribuției continue a masei:
unde este masa totală a sistemului, este volumul și este densitatea. Centrul de masă caracterizează astfel distribuția masei pe un corp sau un sistem de particule.
Se poate arăta că, dacă un sistem este format nu din puncte materiale, ci din corpuri extinse cu mase , atunci vectorul rază a centrului de masă al unui astfel de sistem este legat de vectorii rază ai centrelor de masă ale corpurilor prin relație:
Cu alte cuvinte, în cazul corpurilor extinse, formula este valabilă, structura sa coincizând cu cea folosită pentru punctele materiale.
Legea mișcării centrului de masă
Teorema privind mișcarea centrului de masă (centrul de inerție) al sistemului- una din teoremele generale ale dinamicii, este o consecinta a legilor lui Newton. Afirmă că accelerația centrului de masă sistem mecanic nu depinde de forțele interne care acționează asupra corpurilor sistemului și conectează această accelerație cu forțele externe care acționează asupra sistemului.
Obiectele discutate în teoremă pot fi, în special, următoarele:
Momentul unui punct material și al unui sistem de corpuri este o mărime fizică vectorială, care este o măsură a acțiunii unei forțe și depinde de timpul de acțiune al forței.
Legea conservării impulsului (dovada)
Legea conservării impulsului(Legea conservării impulsului) afirmă că suma vectorială a impulsurilor tuturor corpurilor sistemului este o valoare constantă dacă suma vectorială a forțelor externe care acționează asupra sistemului este egală cu zero.
În mecanica clasică, legea conservării impulsului este de obicei derivată ca o consecință a legilor lui Newton. Din legile lui Newton se poate arăta că atunci când se mișcă în spațiul gol, impulsul se păstrează în timp, iar în prezența interacțiunii, viteza modificării sale este determinată de suma forțelor aplicate.
Ca oricare dintre legile fundamentale de conservare, legea conservării impulsului este asociată, conform teoremei lui Noether, cu una dintre simetriile fundamentale - omogenitatea spațiului.
Conform celei de-a doua legi a lui Newton pentru un sistem de N particule:
unde este impulsul sistemului
a este rezultanta tuturor forțelor care acționează asupra particulelor sistemului
Iată rezultanta forțelor asupra cărora acţionează n a-a particulă din lateral m-oh, a este rezultanta tuturor forțelor externe care acționează k a-a particulă. Conform celei de-a treia legi a lui Newton, forțele de formă și vor fi egale în valoare absolutăși opus în direcție, adică . Prin urmare, a doua sumă din partea dreaptă a expresiei (1) va fi egală cu zero și aflăm că derivata impulsului sistemului în raport cu timpul este egală cu suma vectorială a tuturor forțelor externe care acționează asupra sistemului:
Forțele interne sunt excluse de a treia lege a lui Newton.
Pentru sisteme de la N particule în care suma tuturor forțelor externe este zero
sau pentru sistemele ale căror particule nu sunt afectate de forțe externe (pentru toți k de la 1 la n), avem
După cum se știe, dacă derivata unei expresii este egală cu zero, atunci această expresie este constant față de variabila de diferențiere, ceea ce înseamnă:
(vector constant).
Adică impulsul total al sistemului din N particule, unde N orice număr întreg este o valoare constantă. Pentru N=1 obținem o expresie pentru o particulă.
Legea conservării impulsului este îndeplinită nu numai pentru sistemele asupra cărora nu acționează forțele externe, ci și pentru sistemele în care suma tuturor forțelor externe este egală cu zero. Egalitatea tuturor forțelor externe la zero este suficientă, dar nu necesară, pentru a îndeplini legea conservării impulsului.
Dacă proiecția sumei forțelor externe pe orice direcție sau axă de coordonate este egală cu zero, atunci în acest caz vorbim de legea conservării proiecției impulsului pe această direcție sau axa de coordonate.
Dinamica mișcare de rotație solid
Legea de bază a dinamicii unui PUNCT MATERIAL în timpul mișcării de rotație poate fi formulată după cum urmează:
„Produsul momentului de inerție și al accelerației unghiulare este egal cu momentul rezultat al forțelor care acționează asupra unui punct material: „M = I·e.
Legea de bază a dinamicii mișcării de rotație a unui CORP RIGID față de un punct fix poate fi formulată după cum urmează:
„Produsul momentului de inerție al unui corp și accelerația sa unghiulară este egal cu momentul total al forțelor externe care acționează asupra corpului. Momentele de forță și inerția sunt luate în raport cu axa (z) în jurul căreia are loc rotația:”
Concepte de bază: moment de forță, moment de inerție, moment de impuls
Moment de putere (sinonime: cuplu, cuplu, cuplu, cuplu) este o mărime fizică vectorială egală cu produsul vectorial al vectorului rază (tras de pe axa de rotație până la punctul de aplicare al forței - prin definiție) de vectorul acestei forțe. Caracterizează acțiunea de rotație a unei forțe asupra unui corp solid.
Conceptele de momente de „rotire” și „cuplu” nu sunt în general identice, deoarece în tehnologie conceptul de moment „de rotație” este considerat o forță externă aplicată unui obiect, iar „cuplul” este o forță internă care ia naștere într-un obiect. sub influența sarcinilor aplicate (acest concept este utilizat în domeniul rezistenței materialelor).
Moment de inerție- o mărime fizică scalară (în cazul general - tensor), o măsură a inerției în mișcare de rotație în jurul unei axe, la fel cum masa unui corp este o măsură a inerției sale în mișcare de translație. Se caracterizează prin distribuția maselor în corp: momentul de inerție este egal cu suma produselor maselor elementare prin pătratul distanțelor acestora față de mulțimea de bază (punct, linie sau plan).
Unitatea de măsură în Sistemul internațional unități (SI): kg m².
Impuls(momentul cinetic, momentul unghiular, momentul orbital, momentul unghiular) caracterizează cantitatea de mișcare de rotație. O cantitate care depinde de cât de multă masă se rotește, de modul în care este distribuită în raport cu axa de rotație și cu ce viteză are loc rotația.
Trebuie remarcat faptul că rotația aici este înțeleasă într-un sens larg, nu doar ca rotație regulată în jurul unei axe. De exemplu, chiar și atunci când un corp se mișcă în linie dreaptă pe lângă un punct imaginar arbitrar care nu se află pe linia de mișcare, are și moment unghiular. Poate cel mai mare rol îl joacă momentul unghiular în descrierea mișcării de rotație actuale. Cu toate acestea, este extrem de important pentru o clasă mult mai largă de probleme (mai ales dacă problema are simetrie centrală sau axială, dar nu numai în aceste cazuri).
Cometariu: momentul unghiular în jurul unui punct este un pseudovector, iar momentul unghiular în jurul unei axe este un pseudoscalar.
Momentul unghiular al unui sistem cu buclă închisă este conservat.
Mișcarea mecanică este schimbarea poziției unui corp în spațiu față de alte corpuri în timp.
Expresia cheie din această definiție este „față de alte organisme”. Fiecare dintre noi este nemișcat față de orice suprafață, dar față de Soare noi, împreună cu întregul Pământ, efectuăm mișcare orbitală cu o viteză de 30 km/s, adică mișcarea depinde de sistemul de referință.
Un sistem de referință este un set de sisteme de coordonate și ceasuri asociate cu corpul în raport cu care mișcarea este studiată.
De exemplu, atunci când descriem mișcările pasagerilor în interiorul unei mașini, sistemul de referință poate fi asociat cu o cafenea de pe marginea drumului, sau cu interiorul unei mașini sau cu o mașină care se deplasează din sens opus, dacă estimăm timpul de depășire.
Conversia coordonatelor și timpului
Legea adunării vitezei este o consecință a transformărilor de coordonate și timp.
Lăsați particula la momentul respectiv t' este la punct (x’, y’, z’), iar după scurt timp Δt' la punct (x’ + Δx’, y’ + Δy’, z’ + Δz’) sisteme de referință K' . Acestea sunt două evenimente din istoria unei particule în mișcare. Avem:
Δx' =v x 'Δt’,
Unde
v x ' — X-a-a componentă a vitezei particulelor în sistem K'.
Relații similare sunt valabile pentru componentele rămase.
Coordonează diferențele și intervalele de timp (Δx, Δy, Δz, Δt) sunt convertite în același mod ca și coordonatele:
Δx =Δx' +VΔt’,
Δy =Δу',
Δz =Δz’,
Δt =Δt'.
Rezultă că viteza aceleiași particule în sistem K va avea componentele:
v x =Δx/Δt = (Δx' +VΔt’) /Δt =v x ’ +V,
v y =v y ',
v z =v z ’.
Acest legea adunării vitezei. Poate fi exprimat sub formă vectorială:
v =v̅’ +V
(axele de coordonate în sistemele K și K’ sunt paralele).
Legea adunării vitezei
Dacă un corp se mișcă în raport cu cadrul de referință K 1 cu viteza V 1, iar sistemul de referință K 1 însuși se mișcă în raport cu un alt cadru de referință K 2 cu viteza V, atunci viteza corpului (V 2) față de a doua referință cadrul K 2 este egal cu suma geometrică a vectorilor V 1 și V.
Viteza unui corp în raport cu un sistem de referință fix este egală cu suma vectorială a vitezei corpului în raport cu un sistem de referință în mișcare și cu viteza unui sistem de referință în mișcare față de un sistem de referință staționar.
\(\vec(V_2) = \vec(V_1) + \vec(V) \)
unde mereu
K 2 - cadru de referință fix
V 2 - viteza corpului relativ la un cadru de referință fix (K 2)
K 1 - cadru de referință în mișcare
V 1 - viteza corpului în raport cu cadrul de referință în mișcare (K 1)
V - viteza sistemului de referință în mișcare (K 1) față de sistemul de referință staționar (K 2)
Legea adunării accelerațiilor pentru mișcarea de translație
În cazul mișcării de translație a unui corp în raport cu un sistem de referință în mișcare și a unui sistem de referință în mișcare față de unul staționar, vectorul de accelerație al unui punct (corp) material față de un cadru de referință staționar $\overrightarrow(a)=\ frac(d\overrightarrow(v))(dt)=\ (\ overrightarrow(a))_(ABS)$ (accelerația absolută) este suma vectorului de accelerație al corpului în raport cu cadrul de referință în mișcare $(\overrightarrow (a))_r=\frac(d(\overrightarrow(v))_r)(dt)= (\overrightarrow(a))_(RTN)$ (accelerație relativă) și vectorul de accelerație al cadrului de referință în mișcare relativ la cel staționar $(\overrightarrow(a))_е=\frac(d(\overrightarrow(v))_е)(dt) =(\overrightarrow(a))_(PER)$ (accelerație portabilă):
\[(\overrightarrow(a))_(ABS)=(\overrightarrow(a))_(OTN)+(\overrightarrow(a))_(PER)\]
În cazul general, când mișcarea unui punct material (corp) este curbilinie, ea poate fi reprezentată în fiecare moment de timp ca o combinație a mișcării de translație a unui punct material (corp) față de un cadru de referință în mișcare cu o viteză \((\overrightarrow(v))_r \), și mișcarea de rotație a unui cadru de referință în mișcare în raport cu unul staționar cu viteză unghiulară \((\overrightarrow(\omega ))_e \). În acest caz, la adăugarea accelerațiilor, împreună cu accelerația relativă și de transfer, este necesar să se țină cont de accelerația Coriolis. \(a_c=2(\overrightarrow(\omega ))_e\times (\overrightarrow(v))_r \), care caracterizează modificarea vitezei relative cauzată de mișcarea de translație și modificarea vitezei de translație cauzată de mișcarea relativă.
Teorema Coriolis
Vector de accelerație al unui punct material (corp) în raport cu un cadru de referință fix \(\overrightarrow(a)=\frac(d\overrightarrow(v))(dt)=\ (\overrightarrow(a))_(ABS) \)(accelerația absolută) este suma vectorului de accelerație al corpului în raport cu cadrul de referință în mișcare \((\overrightarrow(a))_r=\frac(d(\overrightarrow(v))_r)(dt)=(\overrightarrow(a))_(OTN) \)(accelerație relativă), vectorul de accelerație al unui cadru de referință în mișcare față de unul staționar \((\overrightarrow(a))_е=\frac(d(\overrightarrow(v))_е)(dt)=(\overrightarrow(a))_(PER) \)(accelerația transportului) și accelerația Coriolis \(a_c=2(\overrightarrow((\mathbf \omega )))_e\times (\overrightarrow(v))_r=(\overrightarrow(a))_(KOR) \):
\[(\overrightarrow(a))_(ABS)=(\overrightarrow(a))_(OTN)+(\overrightarrow(a))_(PER)+(\overrightarrow(a))_(KOR)\ ]
Mișcarea absolută este egală cu suma mișcărilor relative și portabile.
Deplasarea unui corp într-un cadru de referință fix este egală cu suma deplasărilor: a corpului într-un cadru de referință mobil și cadrul de referință în mișcare în sine față de cel staționar.
Javascript este dezactivat în browserul dvs.Pentru a efectua calcule, trebuie să activați controalele ActiveX!
Care au fost formulate de Newton la sfârșitul secolului al XVII-lea, timp de aproximativ două sute de ani a fost considerat totul explicativ și infailibil. Până în secolul al XIX-lea, principiile sale păreau omnipotente și au stat la baza fizicii. Cu toate acestea, în această perioadă, au început să apară fapte noi care nu puteau fi strânse în cadrul obișnuit al legilor cunoscute. De-a lungul timpului, au primit o altă explicație. Acest lucru s-a întâmplat odată cu apariția teoriei relativității și a misterioasei științe a mecanicii cuantice. În aceste discipline, toate ideile acceptate anterior despre proprietățile timpului și spațiului au suferit o revizuire radicală. În special, legea relativistă a adunării vitezelor a demonstrat în mod elocvent limitările dogmelor clasice.
Adăugarea simplă de viteze: când este posibil acest lucru?
Clasicii lui Newton în fizică sunt încă considerați corecti, iar legile sale sunt folosite pentru a rezolva multe probleme. Trebuie doar să țineți cont de faptul că aceștia funcționează în lumea care ne este familiară, unde vitezele diferitelor obiecte, de regulă, nu sunt semnificative.
Să ne imaginăm o situație în care un tren călătorește din Moscova. Viteza sa este de 70 km/h. Și în acest moment, în sensul de mers, un pasager călătorește dintr-un vagon în altul, alergând 2 metri într-o secundă. Pentru a afla viteza de mișcare a acestuia în raport cu casele și copacii care clipesc în afara ferestrei trenului, vitezele indicate trebuie pur și simplu adunate. Deoarece 2 m/s corespunde cu 7,2 km/h, viteza dorită va fi de 77,2 km/h.

Lumea vitezei mari
Fotonii și neutrinii sunt o altă chestiune; ei se supun unor reguli complet diferite. Pentru ei funcționează legea relativistă a adunării vitezelor, iar principiul arătat mai sus este considerat complet inaplicabil pentru ei. De ce?
Conform teoriei speciale a relativității (STR), orice obiect nu se poate mișca mai repede decât lumina. Ea în ca ultimă soluție capabil doar să fie aproximativ comparabil cu acest parametru. Dar dacă ne imaginăm pentru o secundă (deși în practică acest lucru este imposibil) că în exemplul anterior trenul și pasagerul se deplasează aproximativ în acest fel, atunci viteza lor în raport cu obiectele care se sprijină pe sol, pe lângă care trece trenul. , ar fi egal cu aproape de două ori viteza luminii. Și asta nu ar trebui să se întâmple. Cum se fac calculele în acest caz?
Legea relativistă a adunării vitezelor, cunoscută de la cursul de fizică de clasa a XI-a, este reprezentată de formula dată mai jos.

Ce înseamnă?
Dacă există două sisteme de referință, viteza unui anumit obiect relativ la care este V 1 și V 2, atunci pentru calcule puteți utiliza relația specificată, indiferent de valoarea anumitor cantități. În cazul în care ambele sunt semnificativ mai mici decât viteza luminii, numitorul din partea dreaptă a egalității este practic egal cu 1. Aceasta înseamnă că formula pentru legea relativistă a adunării vitezelor se transformă în cea mai comună. , adică V 2 = V 1 + V.
De asemenea, trebuie remarcat faptul că atunci când V 1 = C (adică viteza luminii), pentru orice valoare a lui V, V 2 nu va depăși această valoare, adică va fi, de asemenea, egală cu C.
Din tărâmul fanteziei
C este o constantă fundamentală, valoarea sa este de 299.792.458 m/s. De pe vremea lui Einstein, se crede că niciun obiect din Univers nu poate depăși mișcarea luminii în vid. Așa putem defini pe scurt legea relativistă a adunării vitezelor.
Cu toate acestea, scriitorii de science fiction nu au vrut să se împace cu asta. Ei au inventat și continuă să inventeze multe povești uimitoare, ai căror eroi resping o astfel de limitare. Într-o clipită nave spațiale mutarea în galaxii îndepărtate situate la multe mii de ani lumină depărtare de vechiul Pământ, anulând astfel toate legile stabilite ale universului.

Dar de ce sunt Einstein și adepții săi siguri că acest lucru nu se poate întâmpla în practică? Ar trebui să vorbim despre de ce limita luminii este atât de nezdruncinată și legea relativistă a adunării vitezelor este inviolabilă.
Relația dintre cauză și efect
Lumina este un purtător de informații. Este o reflectare a realității Universului. Iar semnalele luminoase care ajung la observator recreează imagini ale realității în mintea lui. Acest lucru se întâmplă în lumea care ne este familiară, unde totul merge ca de obicei și respectă regulile obișnuite. Și de la naștere suntem obișnuiți cu faptul că nu poate fi altfel. Dar dacă ne imaginăm că totul în jur s-a schimbat și cineva a plecat în spațiu, călătorind cu viteză superluminală? Din moment ce el este înaintea fotonilor luminii, lumea începe să-i apară ca și cum ar fi un film reluat invers. În loc de mâine, vine ieri pentru el, apoi alaltăieri și așa mai departe. Și nu va vedea niciodată mâine până nu se oprește, desigur.

Apropo, scriitorii de science fiction au adoptat în mod activ o idee similară, creând un analog al unei mașini a timpului folosind aceste principii. Eroii lor s-au întors în timp și au călătorit acolo. Cu toate acestea, relațiile cauză-efect s-au prăbușit. Și s-a dovedit că în practică acest lucru este greu de posibil.
Alte paradoxuri
Motivul pentru care nu poate fi înainte este contrar logicii umane normale, deoarece trebuie să existe ordine în Univers. Totuși, SRT implică și alte paradoxuri. Ea spune că, chiar dacă comportamentul obiectelor se supune definiției stricte a legii relativiste a adunării vitezelor, este imposibil să se potrivească exact viteza de mișcare cu fotonii luminii. De ce? Da, pentru că încep să apară transformări cu adevărat magice. Masa crește la nesfârșit. Dimensiunile unui obiect material în direcția de mișcare se apropie la infinit de zero. Și din nou, tulburările nu pot fi complet evitate în timp. Deși nu se mișcă înapoi, când atinge viteza luminii se oprește complet.
Eclipsa din Io
SRT afirmă că fotonii luminii sunt cei mai mulți obiecte rapideîn Univers. În acest caz, cum a fost posibil să le măsoare viteza? Doar că gândirea umană s-a dovedit a fi mai rapidă. Ea a fost capabilă să rezolve o dilemă similară, iar consecința ei a fost legea relativistă a adunării vitezelor.
Întrebări similare au fost rezolvate pe vremea lui Newton, în special, în 1676 de către astronomul danez O. Roemer. El a realizat că viteza luminii ultrarapide poate fi determinată doar atunci când parcurge distanțe enorme. Acest lucru, credea el, era posibil numai în rai. Și oportunitatea de a aduce această idee la viață s-a prezentat curând când Roemer a observat printr-un telescop eclipsa uneia dintre lunile lui Jupiter numită Io. Intervalul de timp dintre intrarea în blackout și apariția acestei planete pentru prima dată a fost de aproximativ 42,5 ore. Și de data aceasta totul a fost aproximativ la fel calcule preliminare, efectuată conform perioadă cunoscută Apelurile lui Io.

Câteva luni mai târziu, Roemer și-a efectuat din nou experimentul. În această perioadă, Pământul s-a îndepărtat semnificativ de Jupiter. Și s-a dovedit că Io a întârziat 22 de minute să-și arate fața în comparație cu presupunerile anterioare. Ce a însemnat asta? Explicația a fost că satelitul nu a întârziat deloc, dar semnalele luminoase de la acesta au durat ceva timp pentru a acoperi o distanță semnificativă până la Pământ. După ce a făcut calcule pe baza acestor date, astronomul a calculat că viteza luminii este foarte semnificativă și este de aproximativ 300.000 km/s.
Experiența lui Fizeau
Precursor al legii relativiste a adunării vitezelor, experimentul lui Fizeau, efectuat aproape două secole mai târziu, a confirmat corect presupunerile lui Roemer. Doar celebrul fizician francez a efectuat experimente de laborator în 1849. Și pentru a le implementa, a fost inventat și proiectat un întreg mecanism optic, un analog al căruia poate fi văzut în figura de mai jos.

Lumina a venit de la sursă (aceasta a fost etapa 1). Apoi s-a reflectat de pe placă (etapa 2) și a trecut între dinții roții rotative (etapa 3). În continuare, razele lovesc o oglindă situată la o distanță considerabilă, măsurată la 8,6 kilometri (etapa 4). În cele din urmă, lumina a fost reflectată înapoi și a trecut prin dinții roții (pasul 5), pătrunzând în ochii observatorului și înregistrată de acesta (pasul 6).
Roata s-a rotit cu viteze diferite. Când se mișca încet, lumina era vizibilă. Pe măsură ce viteza creștea, razele au început să dispară fără să ajungă la privitor. Motivul este că grinzile au luat ceva timp să se miște, iar în această perioadă, dinții roții s-au mișcat ușor. Când viteza de rotație a crescut din nou, lumina a ajuns din nou la ochiul observatorului, deoarece acum dinții, mișcându-se mai repede, au permis din nou razelor să pătrundă prin goluri.
Principiile SRT
Teoria relativistă a fost introdusă pentru prima dată în lume de Einstein în 1905. Dedicat acest lucru descrierea evenimentelor care au loc cel mai mult sisteme diferite ah referință, comportamentul câmpurilor magnetice și electromagnetice, particulelor și obiectelor atunci când se mișcă, cât mai aproape de viteza luminii. Mare fizician a descris proprietățile timpului și spațiului și, de asemenea, a luat în considerare comportamentul altor parametri, dimensiunile corpurilor fizice și masele lor în condițiile specificate. Printre principiile de bază, Einstein a numit egalitatea oricăror cadre de referință inerțiale, adică a vrut să spună asemănarea proceselor care au loc în ele. Un alt postulat al mecanicii relativiste este legea adunării vitezelor într-o versiune nouă, neclasică.
Spațiul, conform acestei teorii, este reprezentat ca gol, unde funcționează totul. Timpul este definit ca o anumită cronologie a proceselor și evenimentelor în curs. Se mai numește pentru prima dată ca a patra dimensiune spațiul însuși, primind acum numele „spațiu-timp”.
Transformări Lorentz
Legea relativistă a adunării ratelor de transformare Lorentz este confirmată. Acesta este numele obișnuit pentru formulele matematice, care sunt prezentate în versiunea finală de mai jos.

Aceste relații matematice sunt centrale pentru teoria relativității și servesc la transformarea coordonatelor și a timpului, fiind scrise pentru un spațiu-timp cvadruplu. Formulele prezentate au primit acest nume la sugestia lui Henri Poincaré, care, în timp ce dezvolta aparatul matematic pentru teoria relativității, a împrumutat câteva idei de la Lorentz.
Astfel de formule dovedesc nu numai imposibilitatea depășirii barierei supersonice, ci și inviolabilitatea principiului cauzalității. Potrivit acestora, a devenit posibilă fundamentarea matematică a dilatării timpului, a scurtării lungimii obiectelor și a altor miracole care au loc în lumea vitezelor ultra-înalte.
Viteză este o caracteristică cantitativă a mișcării corpului.
viteza medie este o mărime fizică egală cu raportul dintre vectorul deplasării punctului și perioada de timp Δt în care a avut loc această deplasare. Direcția vectorului viteză medie coincide cu direcția vectorului deplasare. Viteza medie este determinată de formula:
Viteza instantanee, adică viteza la un moment dat în timp este o mărime fizică egală cu limita la care tinde viteza medie cu o scădere infinită a perioadei de timp Δt:
Cu alte cuvinte, viteza instantanee la un moment dat în timp este raportul dintre o mișcare foarte mică și o perioadă foarte scurtă de timp în care a avut loc această mișcare.
Vectorul viteză instantanee este direcționat tangențial la traiectoria corpului (Fig. 1.6).

Orez. 1.6. Vector viteză instantanee.
În sistemul SI, viteza este măsurată în metri pe secundă, adică unitatea de viteză este de obicei considerată a fi viteza unei astfel de uniforme. mișcare rectilinie, în care într-o secundă corpul parcurge o distanță de un metru. Unitatea de măsură a vitezei este indicată de Domnișoară. Viteza este adesea măsurată în alte unități. De exemplu, atunci când se măsoară viteza unei mașini, tren etc. unitatea folosită în mod obișnuit este kilometrul pe oră: sau
Adăugarea vitezei
Vitezele mișcării corpului în diferite sisteme de referință sunt legate de cele clasice legea adunării vitezei.
Viteza corporală relativă cadru fix de referință egală cu suma vitezelor corpului în sistem de referință în mișcareși cel mai mobil sistem de referință față de cel staționar.
De exemplu, un tren de pasageri se deplasează de-a lungul căii ferate cu o viteză de 60 km/h. O persoană merge de-a lungul vagonului acestui tren cu o viteză de 5 km/h. Dacă luăm în considerare calea ferată staționară și o luăm ca sistem de referință, atunci viteza unei persoane în raport cu sistemul de referință (adică în raport cu calea ferata), va fi egal cu adăugarea vitezelor trenului și ale persoanei, adică și
Cu toate acestea, acest lucru este adevărat numai dacă persoana și trenul se deplasează pe aceeași linie. Dacă o persoană se mișcă într-un unghi, atunci va trebui să ia în considerare acest unghi, amintindu-și că viteza este cantitatea vectorială.
Acum să ne uităm la exemplul descris mai sus mai detaliat – cu detalii și imagini.
Deci, în cazul nostru, calea ferată este cadru fix de referință. Trenul care se deplasează pe acest drum este cadru de referință în mișcare. Vagonul pe care merge persoana face parte din tren.
Viteza unei persoane în raport cu trăsura (față de cadrul de referință în mișcare) este de 5 km/h. Să o notăm cu litera H.
Viteza trenului (și, prin urmare, a vagonului) față de un cadru fix de referință (adică față de calea ferată) este de 60 km/h. Să o notăm cu litera B. Cu alte cuvinte, viteza trenului este viteza cadrului de referință în mișcare în raport cu cadrul de referință staționar.
Viteza unei persoane în raport cu calea ferată (față de un cadru de referință fix) ne este încă necunoscută. Să o notăm cu litera .
Să asociem sistemul de coordonate XOY cu sistemul de referință fix (Fig. 1.7), iar sistemul de coordonate X P O P Y P cu sistemul de referință în mișcare (vezi și secțiunea Sistem de referință). Acum să încercăm să găsim viteza unei persoane în raport cu un cadru fix de referință, adică în raport cu calea ferată.
Într-o perioadă scurtă de timp Δt apar următoarele evenimente:
Apoi, în această perioadă de timp, mișcarea unei persoane în raport cu calea ferată este:
Acest legea adunării deplasărilor. În exemplul nostru, mișcarea unei persoane față de calea ferată este egală cu suma mișcărilor persoanei față de vagon și vagonul față de calea ferată.
Orez. 1.7. Legea adunării deplasărilor.
Legea adunării deplasărilor se poate scrie după cum urmează:
= Δ H Δt + Δ B Δt
Viteza unei persoane în raport cu calea ferată este: Din moment ce

Viteza unei persoane în raport cu vagonul: Viteza vagonului în raport cu calea ferată: Prin urmare, viteza persoanei în raport cu calea ferată va fi egală cu: Aceasta este legea adăugarea vitezei:
av-physics.narod.ru
Relativitatea mișcării
Acest tutorial video este disponibil prin abonament
Aveți deja un abonament? A intra

Este posibil să fii staționar și să te miști în continuare mai repede decât o mașină de Formula 1? Se dovedește că este posibil. Orice mișcare depinde de alegerea sistemului de referință, adică orice mișcare este relativă. Tema lecției de astăzi: „Relativitatea mișcării. Legea adunării deplasărilor și vitezelor.” Vom învăța cum să alegem un sistem de referință într-un caz dat și cum să găsim deplasarea și viteza unui corp.
Relativitatea mișcării
Mișcarea mecanică este schimbarea poziției unui corp în spațiu față de alte corpuri în timp. Expresia cheie din această definiție este „față de alte organisme”. Fiecare dintre noi este nemișcat față de orice suprafață, dar față de Soare noi, împreună cu întregul Pământ, efectuăm mișcare orbitală cu o viteză de 30 km/s, adică mișcarea depinde de sistemul de referință.
Un sistem de referință este un set de sisteme de coordonate și ceasuri asociate cu corpul în raport cu care mișcarea este studiată. De exemplu, atunci când descriem mișcările pasagerilor în interiorul unei mașini, sistemul de referință poate fi asociat cu o cafenea de pe marginea drumului, sau cu interiorul unei mașini, sau cu o mașină care se deplasează din sens opus, dacă estimăm timpul de depășire (Fig. 1). .

Orez. 1. Selectarea sistemului de referință
Ce mărimi fizice iar conceptele depind de alegerea cadrului de referință?
1. Poziția corpului sau coordonatele
Să luăm în considerare un punct arbitrar. În diferite sisteme are coordonate diferite (Fig. 2).

Orez. 2. Coordonatele unui punct în diferite sisteme de coordonate
Luați în considerare traiectoria unui punct de pe elicea unui avion în două cadre de referință: cadrul de referință asociat cu pilotul și cadrul de referință asociat cu observatorul de pe Pământ. Pentru pilot, acest punct va efectua o rotație circulară (Fig. 3).

Orez. 3. Rotație circulară
În timp ce pentru un observator de pe Pământ traiectoria acestui punct va fi o linie elicoidală (Fig. 4). Evident, traiectoria depinde de alegerea sistemului de referință.

Orez. 4. Traseu elicoidal
Relativitatea traiectoriei. Traiectorii mișcării corpului în diverse sisteme de referință
Să luăm în considerare modul în care traiectoria mișcării se modifică în funcție de alegerea sistemului de referință folosind exemplul unei probleme.
Care va fi traiectoria punctului de la capătul elicei în diferite puncte de referință?
1. În CO asociat cu pilotul aeronavei.
2. În CO asociat cu observatorul de pe Pământ.
1. Nici pilotul, nici elicea nu se deplasează în raport cu avionul. Pentru pilot, traiectoria punctului va părea a fi un cerc (Fig. 5).

Orez. 5. Traiectoria punctului relativ la pilot
2. Pentru un observator de pe Pământ, un punct se mișcă în două moduri: rotind și înainte. Traiectoria va fi elicoidală (Fig. 6).

Orez. 6. Traiectoria unui punct în raport cu un observator de pe Pământ
Răspuns : 1) cerc; 2) helix.
Folosind această problemă ca exemplu, am fost convinși că traiectoria este un concept relativ.
Ca test independent, vă sugerăm să rezolvați următoarea problemă:
Care va fi traiectoria unui punct de la capătul roții în raport cu centrul roții, dacă această roată se mișcă înainte, și în raport cu punctele de pe sol (un observator staționar)?
3. Mișcarea și calea
Să luăm în considerare o situație în care o plută plutește și la un moment dat un înotător sare de pe ea și încearcă să treacă pe malul opus. Mișcarea înotătorului față de pescarul care stă pe mal și față de plută va fi diferită (Fig. 7).
Mișcarea relativă la sol se numește absolută, iar mișcarea relativă la un corp în mișcare se numește relativă. Mișcarea unui corp în mișcare (plută) în raport cu un corp staționar (pescăr) se numește portabil.

Orez. 7. Mișcarea înotătorului
Din exemplu rezultă că deplasarea și calea sunt cantități relative.
Folosind exemplul anterior, puteți arăta cu ușurință că viteza este, de asemenea, o cantitate relativă. La urma urmei, viteza este raportul dintre mișcare și timp. Timpul nostru este același, dar călătoria noastră este diferită. Prin urmare, viteza va fi diferită.
Se numește dependența caracteristicilor mișcării de alegerea sistemului de referință relativitatea mișcării.
În istoria omenirii au existat cazuri dramatice asociate tocmai cu alegerea unui sistem de referință. Executarea lui Giordano Bruno, abdicare Galileo Galilei- toate acestea sunt consecințe ale luptei dintre susținătorii sistemului de referință geocentric și sistemul de referință heliocentric. A fost foarte greu pentru omenire să se obișnuiască cu ideea că Pământul nu este deloc centrul universului, ci o planetă complet obișnuită. Iar mișcarea poate fi considerată nu numai relativă la Pământ, această mișcare va fi absolută și relativă la Soare, stele sau orice alte corpuri. Descrierea mișcării corpurilor cerești într-un cadru de referință asociat cu Soarele este mult mai convenabilă și mai simplă; acest lucru a fost demonstrat în mod convingător mai întâi de Kepler, și apoi de Newton, care, pe baza unei analize a mișcării Lunii în jurul Pământului, a derivat faimoasa sa lege a gravitației universale.
Dacă spunem că traiectoria, calea, deplasarea și viteza sunt relative, adică depind de alegerea sistemului de referință, atunci nu spunem asta despre timp. În cadrul mecanicii clasice sau newtoniene, timpul este o valoare absolută, adică curge în mod egal în toate sistemele de referință.
Să luăm în considerare cum să găsim deplasarea și viteza într-un sistem de referință dacă ne sunt cunoscute într-un alt sistem de referință.
Să luăm în considerare situația anterioară, când o plută plutește și la un moment dat un înotător sare de pe ea și încearcă să treacă pe malul opus.
Cum este mișcarea unui înotător în raport cu un SO staționar (asociat cu pescarul) de mișcarea unui SO relativ mobil (asociat cu pluta) (Fig. 8)?
Orez. 8. Ilustrație pentru problema
Am numit mișcare într-un cadru de referință staționar. Din triunghiul vectorial rezultă că ![]() . Acum să trecem la găsirea relației dintre viteze. Să ne amintim că în cadrul mecanicii newtoniene timpul este valoare absolută(timpul curge la fel în toate sistemele de referință). Aceasta înseamnă că fiecare termen din egalitatea anterioară poate fi împărțit în timp. Primim:
. Acum să trecem la găsirea relației dintre viteze. Să ne amintim că în cadrul mecanicii newtoniene timpul este valoare absolută(timpul curge la fel în toate sistemele de referință). Aceasta înseamnă că fiecare termen din egalitatea anterioară poate fi împărțit în timp. Primim:
![]()
![]()
– aceasta este viteza cu care se deplasează înotatorul pentru pescar;
– este viteza proprie a înotătorului;
este viteza plutei (viteza curgerii râului).
Problemă privind legea adunării vitezelor
Să luăm în considerare legea adunării vitezelor folosind un exemplu de problemă.
Două mașini se mișcă una spre alta: prima mașină cu viteză, a doua cu viteză. Cu ce viteză se apropie mașinile una de alta (Fig. 9)?

Orez. 9. Ilustrație pentru problema
Să aplicăm legea adunării vitezelor. Pentru a face acest lucru, să trecem de la CO obișnuit asociat cu Pământul la CO asociat cu prima mașină. Astfel, prima mașină devine staționară, iar cea de-a doua se deplasează spre ea cu viteză (viteză relativă). Cu ce viteză, dacă prima mașină staționează, se rotește Pământul în jurul primei mașini? Se rotește cu o viteză, iar viteza este direcționată în direcția vitezei celei de-a doua mașini (viteza de transfer). Se însumează doi vectori care sunt direcționați de-a lungul aceleiași drepte. .
Răspuns: .
Limitele de aplicabilitate ale legii adunării vitezelor. Legea adunării vitezelor în teoria relativității
Multă vreme s-a crezut că legea clasică a adunării vitezelor este întotdeauna valabilă și se aplică tuturor sistemelor de referință. Cu toate acestea, cu aproximativ ani în urmă s-a dovedit că în unele situații această lege nu funcționează. Să luăm în considerare acest caz folosind un exemplu de problemă.
Imaginați-vă că vă aflați pe o rachetă spațială care se mișcă cu o viteză de . Și căpitanul rachetă spațială aprinde lanterna în direcția de mișcare a rachetei (Fig. 10). Viteza de propagare a luminii în vid este de . Care va fi viteza luminii pentru un observator staționar pe Pământ? Va fi egală cu suma vitezelor luminii și a rachetei?

Orez. 10. Ilustrație pentru problema
Cert este că aici fizica se confruntă cu două concepte contradictorii. Pe de o parte, conform electrodinamicii lui Maxwell, viteza maximă este viteza luminii și este egală cu . Pe de altă parte, conform mecanicii newtoniene, timpul este o valoare absolută. Problema a fost rezolvată când Einstein a propus teoria specială a relativității, sau mai degrabă postulatele acesteia. El a fost primul care a sugerat că timpul nu este absolut. Adică, undeva curge mai repede, iar undeva mai încet. Desigur, în lumea noastră nu observăm viteze mici acest efect. Pentru a simți această diferență, trebuie să ne mișcăm la viteze apropiate de viteza luminii. Pe baza concluziilor lui Einstein, a fost obținută legea adunării vitezelor în teoria relativității speciale. Arata cam asa:
– este viteza relativă la CO staționar;
– este viteza relativă la CO în mișcare;
este viteza CO în mișcare în raport cu CO staționar.
Dacă înlocuim valorile din problema noastră, aflăm că viteza luminii pentru un observator staționar pe Pământ va fi de .
Controversa a fost rezolvată. De asemenea, vă puteți asigura că dacă vitezele sunt foarte mici în comparație cu viteza luminii, atunci formula pentru teoria relativității se transformă în formula clasică pentru adăugarea vitezelor.
În cele mai multe cazuri vom folosi legea clasică.
Concluzie
Astăzi am aflat că mișcarea depinde de sistemul de referință, că viteza, calea, mișcarea și traiectoria sunt concepte relative. Iar timpul în cadrul mecanicii clasice este un concept absolut. Am învățat să aplicăm cunoștințele dobândite analizând câteva exemple tipice.
- Tikhomirova S.A., Yavorsky B.M. Fizica (nivel de bază) - M.: Mnemosyne, 2012.
- Gendenshtein L.E., Dick Yu.I. Fizica clasa a X-a. – M.: Mnemosyne, 2014.
- Kikoin I.K., Kikoin A.K. Fizica - 9, Moscova, Educație, 1990.
- Portalul de internet Class-fizika.narod.ru (Sursa).
- Portalul de internet Nado5.ru (Sursa).
- Portalul de internet Fizika.ayp.ru (Sursa).
- Definiți relativitatea mișcării.
- Ce mărimi fizice depind de alegerea sistemului de referință?
Legea adunării deplasărilor și vitezelor
Lasă o barcă cu motor să plutească de-a lungul râului și îi cunoaștem viteza în raport cu apă, sau mai precis, în raport cu cadrul de referință K1, deplasându-se odată cu apa.
Un astfel de cadru de referință poate fi asociat, de exemplu, cu o minge care cade dintr-o barcă și plutește odată cu fluxul. Dacă se cunoaște și viteza curentului de râu în raport cu sistemul de referință K2 asociat malului, adică viteza sistemului de referință K1 față de sistemul de referință K2, atunci viteza ambarcațiunii în raport cu țărm poate fi determinat (Fig. 1.20).
Pe o perioadă de timp, mișcările bărcii și mingii față de țărm sunt egale și (Fig. 1.20), iar mișcarea bărcii față de minge este egală. Din figura 1.21 se poate observa că
Împărțind părțile stânga și dreaptă ale ecuației (1.8) la, obținem
De asemenea, să luăm în considerare că rapoartele deplasărilor la intervalele de timp sunt egale cu vitezele. De aceea
Vitezele se adună geometric, ca toți ceilalți vectori.
Am obținut un rezultat simplu și remarcabil, care se numește legea adunării vitezelor: dacă un corp se mișcă față de un anumit sistem de referință K1 cu viteză și sistemul de referință K1 însuși se mișcă în raport cu un alt sistem de referință K2 cu viteză, atunci viteza corpului faţă de al doilea sistem de referinţă este egală cu suma geometrică a vitezelor şi. Legea adunării vitezelor este valabilă și pentru mișcarea neuniformă. În acest caz, se adună vitezele instantanee.
Ca orice ecuație vectorială, ecuația (1.9) este o reprezentare compactă a ecuațiilor scalare, în acest caz pentru adăugarea proiecțiilor vitezelor de mișcare pe un plan:
Proiecțiile vitezei sunt adăugate algebric.
Legea adunării vitezelor permite determinarea vitezei unui corp în raport cu diferite sisteme de referință care se deplasează unul față de celălalt.
Temă de auto-studiu:
1. Fii pregătit să răspunzi la următoarele întrebări.
1) Formulați legea adunării vitezelor.
2) Ce ne permite să determinăm legea adunării vitezelor?
2. Finalizați sarcinile de testare și rezolvați probleme.
1) Ex. 2(1,2) (Myakishev G.Ya., Bukhovtsev B.B., Sotsky N.N. Fizica. Clasa a X-a: manual pentru organizațiile educaționale: de bază și niveluri de profil. – M: Iluminarea, 2014)
2) Nr. 41, 42, 44 (Parfentyeva N.A. Culegere de probleme în fizică clasele 10-11: un manual pentru studenții organizațiilor de învățământ general: niveluri de bază și de specialitate. - M: Prosveshchenie, 2014)
3) Testul 10.1.1 Nr. 18.24
3. Literatură de bază.
1) Myakishev G.Ya., Bukhovtsev B.B., Sotsky N.N. Fizică. Clasa a 10-a: manual pentru organizațiile de învățământ general: nivel de bază și de specialitate. – M: Iluminismul, 2014
2) Parfentyeva N.A. Culegere de probleme la fizică clasele 10-11: un manual pentru studenții organizațiilor de învățământ general: niveluri de bază și de specialitate. – M: Iluminismul, 2014
Adăugarea vitezelor și trecerea la un alt sistem de referință atunci când se deplasează de-a lungul unei linii drepte
1. Adăugarea vitezelor
Unele probleme iau în considerare mișcarea unui corp în raport cu un alt corp, care se mișcă și el într-un cadru de referință ales. Să ne uităm la un exemplu.
O plută plutește de-a lungul râului, iar o persoană merge de-a lungul plutei în direcția curgerii râului - în direcția în care plutește pluta (Fig. 3.1, a). Folosind un stâlp instalat pe plută, este posibil să se marcheze atât mișcarea plutei față de țărm, cât și mișcarea unei persoane față de plută.
Să notăm viteza unei persoane în raport cu pluta cu pb, iar viteza plutei în raport cu țărm cu pb. (De obicei se presupune că viteza plutei în raport cu țărm este egală cu viteza curgerii râului. Vom nota viteza și mișcarea corpului 1 față de corpul 2 folosind doi indici: primul indice se referă la corpul 1. , iar al doilea la corpul 2. De exemplu, 12 indică viteza corpului 1 în raport cu corpul 2.)
Să luăm în considerare mișcările unei persoane și ale unei plute pe o anumită perioadă de timp t.
Să notăm cu pb mișcarea plutei față de țărm, iar mișcarea unei persoane față de plută cu chp (fig. 3.1, b).
Vectorii de deplasare sunt prezentați în figuri cu săgeți punctate pentru a-i deosebi de vectorii viteză, indicați cu săgeți solide.
Mișcarea unei persoane cu greutate corporală față de țărm este egală cu suma vectorială a mișcării persoanei față de plută și mișcarea plutei față de țărm (Fig. 3.1, c):
Bw = pb + bp (1)
Să conectăm acum mișcările cu viteze și interval de timp t. Vom obține:
Chp = chp t, (2)
pb = pb t, (3)
bw = bw t, (4)
unde bw este viteza unei persoane față de țărm.
Înlocuind formulele (2–4) în formula (1), obținem:
Bw t = pb t + bp t.
Să reducem ambele părți ale acestei ecuații cu t și obținem:
Bw = pb + cap. (5)
Regula de adăugare a vitezei
Relația (5) este regula de adunare a vitezelor. Este o consecință a adunării deplasărilor (vezi Fig. 3.1, c, mai jos). ÎN vedere generala Regula pentru adăugarea vitezei arată astfel:
1 = 12 + 2 . (6)
unde 1 și 2 sunt vitezele corpurilor 1 și 2 din același cadru de referință, iar 12 este viteza corpului 1 în raport cu corpul 2.
Deci, viteza 1 a corpului 1 într-un cadru de referință dat este egală cu suma vectorială a vitezei 12 a corpului 1 în raport cu corpul 2 și a vitezei 2 a corpului 2 în același cadru de referință.
În exemplul discutat mai sus, viteza persoanei în raport cu pluta și viteza plutei în raport cu țărm au fost în aceeași direcție. Acum luați în considerare cazul când sunt direcționate în sens opus.Nu uitați că vitezele trebuie adăugate conform regulii adunării vectoriale!
1. Un om merge de-a lungul unei plute împotriva curentului (Fig. 3.2). Faceți în caiet un desen care să poată fi folosit pentru a afla viteza unei persoane față de țărm. Scala pentru vectorul viteză: două celule corespund la 1 m/s.
Este necesar să se poată adăuga viteze atunci când se rezolvă probleme care implică deplasarea ambarcațiunilor sau a navelor pe un râu sau zborul unui avion în prezența vântului. în care apă curgătoare sau aerul în mișcare poate fi gândit ca o „plută” care se mișcă cu o viteză constantă față de sol, „purând” nave, avioane etc.
De exemplu, viteza unei bărci care plutește pe un râu în raport cu malul este egală cu suma vectorială a vitezei bărcii față de apă și a vitezei curentului râului.
2. Viteza unei ambarcațiuni cu motor față de apă este de 8 km/h, iar viteza curentului este de 4 km/h. Cât timp va dura barca să călătorească de la debarcaderul A la debarcaderul B și înapoi dacă distanța dintre ele este de 12 km?
3. O plută și o barcă cu motor au pornit de la debarcaderul A în același timp. În timpul în care barca a avut nevoie pentru a ajunge la debarcaderul B, pluta parcurse o treime din această distanță.
a) De câte ori este viteza bărcii în raport cu apă mai mare decât viteza curentului?
b) De câte ori este timpul necesar navei să se deplaseze de la B la A decât timpul necesar pentru a trece de la A la B?
4. Avionul a zburat din orașul M în orașul N în 1,5 ore cu vânt în spate. Zborul de întoarcere cu vânt în contra a durat 1 oră și 50 de minute. Viteza aeronavei în raport cu aerul și viteza vântului au rămas constante.
a) De câte ori este viteza avionului în raport cu aerul mai mare decât viteza vântului?
b) Cât timp ar dura să zbori de la M la N pe vreme calmă?
2. Trecerea la un alt sistem de referință
Este mult mai ușor să urmăriți mișcarea a două corpuri dacă treceți la cadrul de referință asociat cu unul dintre aceste corpuri. Corpul cu care este conectat cadrul de referință este în repaus în raport cu acesta, așa că trebuie doar să monitorizați celălalt corp.
O barcă cu motor depășește o plută care plutește pe râu. O oră mai târziu, ea se întoarce și înoată înapoi. Viteza bărcii față de apă este de 8 km/h, viteza curentului este de 2 km/h. Cât timp după viraj se întâlnește barca cu pluta?
Dacă rezolvăm această problemă într-un cadru de referință conectat la țărm, atunci ar trebui să monitorizăm mișcarea a două corpuri - pluta și barca și, de asemenea, să ținem cont că viteza bărcii față de țărm depinde de viteza curentului.
Dacă mergem la cadrul de referință asociat cu pluta, atunci pluta și râul se vor „opri”: la urma urmei, pluta se mișcă de-a lungul râului exact cu viteza curentului. Așadar, în acest cadru de referință, totul se întâmplă ca într-un lac în care nu există curent: barca plutește din plută și spre plută cu aceeași viteză absolută! Și din moment ce s-a îndepărtat pentru o oră, într-o oră se va întoarce înapoi.
După cum puteți vedea, nici viteza curentului și nici viteza ambarcațiunii nu au fost necesare pentru a rezolva problema.
5. În timp ce trecea pe sub un pod într-o barcă, un bărbat și-a scăpat pălăria de paie în apă. O jumătate de oră mai târziu, a descoperit pierderea, a înotat înapoi și a găsit o pălărie plutitoare la o distanță de 1 km de pod. La început, barca plutea odată cu curentul și viteza ei față de apă era de 6 km/h.
Accesați cadrul de referință asociat pălăriei (Figura 3.3) și răspundeți la următoarele întrebări.
a) Cât timp a înotat bărbatul până la pălărie?
b) Care este viteza curentului?
c) Ce informații din condiție nu sunt necesare pentru a răspunde la aceste întrebări?
6. O coloană de picioare lungă de 200 m merge pe un drum drept cu o viteză de 1 m/s. Comandantul din fruntea coloanei trimite un călăreț cu un ordin celui din urmă. Cât timp va dura până se întoarce călărețul dacă galopează cu o viteză de 9 m/s?
Să deducem formula generala pentru a găsi viteza unui corp într-un cadru de referință asociat cu un alt corp. Pentru a face acest lucru, vom folosi regula adunării vitezelor.
Amintiți-vă că este exprimată prin formula
1 = 2 + 12 , (7)
unde 12 este viteza corpului 1 în raport cu corpul 2.
Să rescriem formula (1) sub forma
12 = 1 – 2 , (8)
unde 12 este viteza corpului 1 în cadrul de referință asociat cu corpul 2.
Această formulă vă permite să găsiți viteza 12 a corpului 1 în raport cu corpul 2 dacă viteza 1 a corpului 1 și viteza 2 a corpului 2 sunt cunoscute.
7. În figura 3.4 sunt prezentate trei mașini, ale căror viteze sunt date pe o scară: două celule corespund unei viteze de 10 m/s.
Găsi:
a) viteza mașinilor albastre și violet din cadrul de referință asociat mașinii roșii;
b) viteza mașinilor albastre și roșii în cadrul de referință asociat mașinii violet;
c) viteza mașinilor roșii și violete din cadrul de referință asociat mașinii albastre;
d) care dintre vitezele găsite este cea mai mare în valoare absolută? cel mai mic?
Întrebări și sarcini suplimentare
8. Un bărbat a mers pe o plută de lungimea b și s-a întors la punctul de plecare. Viteza unei persoane în raport cu pluta este întotdeauna îndreptată de-a lungul râului și este egală ca mărime cu vh, iar viteza curentului este egală cu vt. Găsiți o expresie pentru calea parcursă de o persoană față de țărm dacă:
a) la început persoana a mers în direcția curentului;
b) la început persoana a mers în direcția opusă fluxului (luați în considerare toate cazurile posibile!).
c) Aflați întregul drum parcurs de persoană în raport cu țărm: 1) la b = 30 m, v h = 1,5 m/s, v t = 1 m/s; 2) la b = 30 m, v h = 0,5 m/s, v t = 1 m/s.
9. Un pasager dintr-un tren în mișcare a observat că două trenuri care veneau din sens opus treceau pe lângă fereastra lui la un interval de 6 minute. La ce interval au trecut pe langa statie Viteza trenului este de 100 km/h, viteza trenurilor electrice este de 60 km/h.
10. Două persoane au început simultan să coboare scările rulante. Primul stătea pe o treaptă. Cu ce viteză a coborât a doua persoană pe scara rulantă dacă a coborât de 3 ori mai repede decât prima? Viteza scării rulante 0,5 m/s.
1.4. Relativitatea mișcării
1.4.1. Legea adunării deplasărilor și legea adunării vitezelor
Mișcare mecanică același corp arată diferit pentru sisteme de referință diferite.
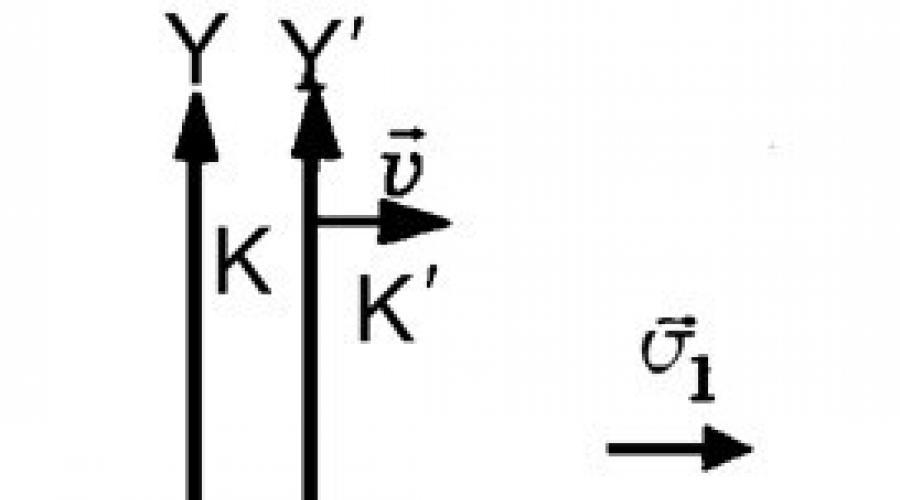
Pentru certitudine, vom folosi două sisteme de referință (Fig. 1.33):
- K - cadru de referință fix;
- K ′ - cadru de referință în mișcare.
Orez. 1.33
Sistemul K ′ se deplasează în raport cu sistemul de referință K în direcția pozitivă a axei Ox cu viteza u → .
Fie în sistemul de referință K un punct material (corp) se mișcă cu viteza v → și în intervalul de timp ∆t face o mișcare Δ r → . Raportat la cadrul de referință K ′, acest punct material are o viteză v → ′ și în intervalul de timp specificat ∆t se deplasează Δ r ′ →.
Legea adunării deplasărilor
Deplasările unui punct material într-un sistem de referință staționar (K) și în mișcare (K ′) (Δ r → și, respectiv, Δ r ′ →) diferă între ele și sunt legate legea adunării deplasărilor:
Δ r → = Δ r ′ → + u → Δ t,
unde Δ r → este mișcarea unui punct material (corp) pe un interval de timp ∆t într-un cadru de referință staționar K; Δ r ′ → - mișcarea unui punct material (corp) pe un interval de timp ∆t într-un cadru de referință în mișcare K ′; u → este viteza de deplasare a cadrului de referință K′ în raport cu cadrul de referință K.
Legea adunării deplasărilor corespunde cu „ triunghi de deplasare„(Fig. 1.34).

Legea adunării deplasărilor la rezolvarea problemelor este uneori recomandabil să scrieți forma de coordonate:
Δ x = Δ x ′ + u x Δ t , Δ y = Δ y ′ + u y Δ t , )
unde ∆x și ∆y sunt modificarea coordonatelor x și y a punctului material (corpului) pe intervalul de timp ∆t în sistemul de referință K; ∆x ′ și ∆y ′ - modificarea coordonatelor corespunzătoare ale punctului material (corpului) pe intervalul de timp ∆t în sistemul de referință K ′; u x și u y sunt proiecții ale vitezei u → sistemul de referință K ′, care se deplasează în raport cu sistemul de referință K, pe axele de coordonate.
Legea adunării vitezei
Vitezele unui punct material într-un sistem de referință staționar (K) și în mișcare (K ′) (v → și, respectiv, v → ′), de asemenea, diferă între ele și sunt legate legea adunării vitezei:
v → = v → ′ + u → ,
unde u → este viteza de deplasare a cadrului de referință K′ în raport cu cadrul de referință K.
Legea adunării vitezei corespunde cu „ triunghiul vitezei„(Fig. 1.35).

Orez. 1.35
Când rezolvați probleme, uneori este recomandabil să scrieți legea adunării vitezelor în proiectii pe axe de coordonate:
v x = v ′ x + u x , v y = v ′ y + u y , )
Viteza relativă a două corpuri
Pentru determinare viteza relativa mișcarea a două corpuri este convenabil să folosiți următorul algoritm:
4) reprezentați vectorii v → , v → ′ și u → în sistemul de coordonate xOy;
5) notează legea adunării vitezelor în forma
v → = v → ′ + u → sau v x = v ′ x + u x , v y = v ′ y + u y ; )
6) exprimă v → ′:
v → ′ = v → − u →
sau v ′ x și v ′ y:
v ′ x = v x − u x , v ′ y = v y − u y ; )
7) găsiți mărimea vectorului viteză relativă v → ′ folosind formula
v ′ = v ′ x 2 + v ′ y 2 ,
unde v x și v y sunt proiecții ale vectorului viteză v → punct material (corp) din sistemul de referință K pe axele de coordonate; v ′ x și v ′ y - proiecții ale vectorului viteză v → ′ a unui punct material (corp) din sistemul de referință K ′ pe axele de coordonate; u x și u y sunt proiecții ale vitezei u → sistemul de referință K ′, care se deplasează în raport cu sistemul de referință K, pe axele de coordonate.
Pentru a determina viteza relativă a două corpuri în mișcare de-a lungul unei axe de coordonate, este convenabil să utilizați următorul algoritm:
1) aflați care organism este considerat sistemul de referință; viteza acestui corp se notează cu u → ;
2) notăm viteza celui de-al doilea corp ca v → ;
3) viteza relativă a corpurilor se notează cu v → ′;
4) vectorii v → , v → ′ și u → reprezentați pe axa de coordonate Ox;
5) scrieți legea adunării vitezelor sub forma:
v x = v ′ x + u x ;
6) exprimă v ′ x:
v ′ x = v x − u x ;
7) găsiți mărimea vectorului viteză relativă v → folosind formula
v ′ = | v ′ x | ,
unde v x și v y sunt proiecții ale vectorului viteză v → punct material (corp) din sistemul de referință K pe axele de coordonate; v ′ x și v ′ y - proiecții ale vectorului viteză v → ′ a unui punct material (corp) din sistemul de referință K ′ pe axele de coordonate; u x și u y sunt proiecții ale vitezei u → sistemul de referință K ′, care se deplasează în raport cu sistemul de referință K, pe axele de coordonate.
Exemplul 26. Primul corp se deplasează cu o viteză de 6,0 m/s în direcția pozitivă a axei Ox, iar al doilea corp se mișcă cu o viteză de 8,0 m/s în direcția sa negativă. Determinați modulul de viteză al primului corp din cadrul de referință asociat celui de-al doilea corp.
Soluţie. Cadrul de referință în mișcare este al doilea corp; proiecția vitezei u → a cadrului de referință în mișcare pe axa Ox este egală cu:
u x = −8,0 m/s,
întrucât mişcarea celui de-al doilea corp are loc în direcţia negativă a axei indicate.
Primul corp are o viteză v → relativ la un cadru de referință fix; proiecția sa pe axa Ox este egală cu:
v x = 6,0 m/s,
întrucât mişcarea primului corp are loc în direcţia pozitivă a axei indicate.
Pentru a rezolva această problemă, este recomandabil să scrieți legea adunării vitezelor în proiecție pe axa de coordonate, i.e. în următoarea formă:
v x = v ′ x + u x ,
unde v ′ x este proiecția vitezei primului corp în raport cu cadrul de referință în mișcare (al doilea corp).
Mărimea v ′ x este cea dorită; valoarea sa este determinată de formulă
v ′ x = v x − u x .
Hai sa facem calculul:
v ′ x = 6,0 − (− 8,0) = 14 m/s.
Exemplul 29. Sportivii aleargă unul după altul într-un lanț lung de 46 m, cu aceeași viteză. Antrenorul aleargă spre ei cu o viteză de trei ori mai mică decât viteza sportivilor. Fiecare sportiv, după ce a ajuns din urmă cu antrenorul, se întoarce și aleargă înapoi cu aceeași viteză. Care va fi lungimea lanțului când toți sportivii aleargă în direcția opusă?
Soluţie. Lăsați mișcarea sportivilor și a antrenorului să aibă loc de-a lungul axei Ox, al cărei început coincide cu poziția ultimului sportiv. Atunci ecuațiile de mișcare față de Pământ au următoarea formă:
- ultimul sportiv -
x 1 (t) = vt;
- antrenor -
x 2 (t) = L − 1 3 v t ;
- primul sportiv -
x 3 (t) = L − vt,
unde v este modulul de viteză al fiecărui sportiv; 1 3 v - modul de viteza antrenor; L este lungimea inițială a lanțului; t - timp.
Să conectăm cadrul de referință în mișcare cu antrenorul.
Să notăm ecuația de mișcare a ultimului sportiv în raport cu sistemul de referință în mișcare (antrenor) ca x ′(t) și o găsim din legea adunării deplasărilor scrisă sub formă de coordonate:
x (t) = x ′(t) + X (t), adică. x ′(t) = x(t) − X(t),
X (t) = x 2 (t) = L − 1 3 v t -
ecuația de mișcare a antrenorului (cadru de referință în mișcare) față de Pământ;
x (t) = x 1 (t) = vt;
ecuația de mișcare a ultimului atlet în raport cu Pământul.
Înlocuind expresiile x (t), X (t) în ecuația scrisă rezultă:
x ′ (t) = x 1 (t) − x 2 (t) = v t − (L − 1 3 v t) = 4 3 v t − L .
Această ecuație reprezintă ecuația de mișcare a ultimului sportiv în raport cu antrenorul. În momentul întâlnirii ultimului sportiv și antrenor (t = t 0), coordonatele lor relative x ′(t 0) devine zero:
4 3 v t 0 − L = 0 .
Ecuația vă permite să găsiți momentul specificat în timp:
În acest moment, toți sportivii încep să alerge în direcția opusă. Lungimea lanțului de atleți este determinată de diferența dintre coordonatele primului x 3 (t 0) și ultimului x 1 (t 0) atlet la ora specificată:
l = | x 3 (t 0) − x 1 (t 0) | ,
sau explicit:
l = | (L − v t 0) − v t 0 | = | L − 2 v t 0 | = | L − 2 v 3 L 4 v | = 0,5 L = 0,5 ⋅ 46 = 23 m.